
设计了一种基于FPGA的正交匹配追踪(Orthogonal Matching Pursuit,OMP)算法的硬件优化结构,对OMP算法进行了改进,大大减
2021-04-08 13:28
is described. Measurement results from the completed circuit are presented. Download SoftwareThe rewarding pursuit of
2009-04-17 11:35
,因此,该方法比较适合应用于低速曲率较小的路径跟踪控制场景中。 基于运动学模型的横向控制算法中,Pure Pursuit 和 Stanley 前轮反馈算法在中低速场景下,他们的路径跟踪的性能较好。 Pure Pursuit 在大的跟踪误差和非连续的路径场景下鲁棒
2023-11-15 17:02

基追踪(basis pursuit)算法是一种用来求解未知参量L1范数最小化的等式约束问题的算法。字典的构造 对于观测到的离散信号s∈H,H为Hilbert空间,给定H中的字典φ={φγ,γ∈Γ},其中Γ为指标集,φγ为H中的基函数,也称为原子。基追踪方法将信号稀疏表示问题定义为以下有结束的极值问题
2017-12-01 16:04
originbot.launch.py 启动轨迹跟踪 选择Pure Pursuit: $ ros2 run originbot_autonomous purepursuit_node 选择 MPC : $ ros2
2023-11-15 14:29
( In the pursuit of high efficiency, energy saving and highly integrated today, the power management
2024-12-05 13:37
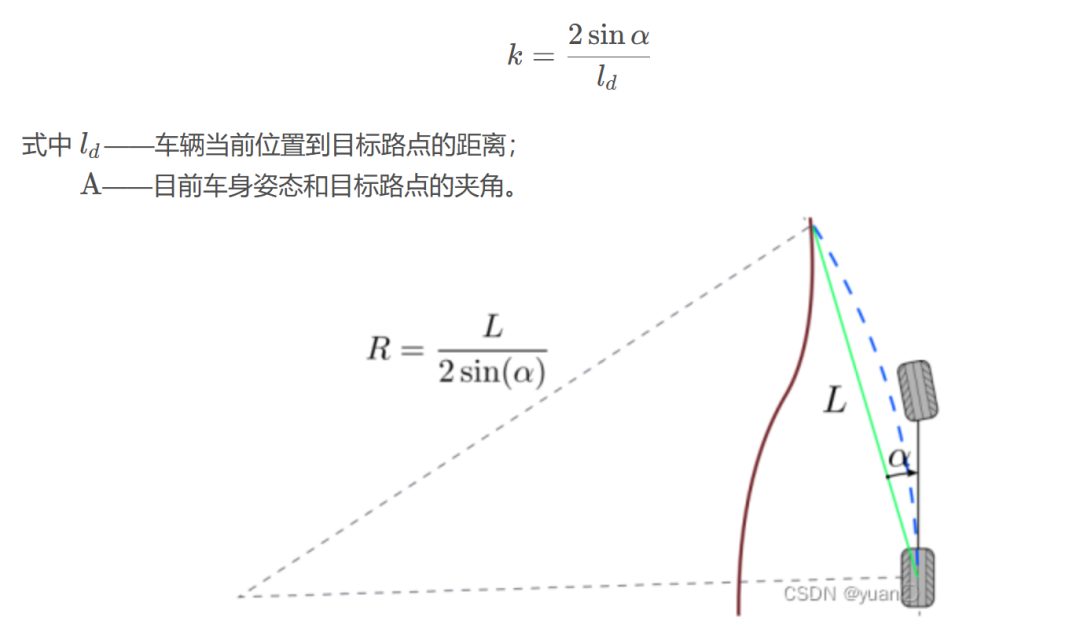
2.1 基于自行车模型的路径跟踪控制算法 2.1.1 纯跟踪控制(Pure Pursuit)算法 纯追踪控制是最早提出的路径跟踪策略之一。由于其易于实现和令人满意的性能,已被证明是车辆控制不可或缺
2023-11-10 17:36
知道该怎样开车。 负责欧洲车辆安全评级和测试的机构(NCAP)有一个雄心勃勃的想法。2017年9月,他们发布了“迈向零伤亡愿景(Pursuit of Vision Zero)”的2025年路线图,目标是实现汽车零事故。大家可以想象一下汽车零事故的情景。根据世界卫生组织的数据,每年有130多万人死于交
2022-11-23 08:20
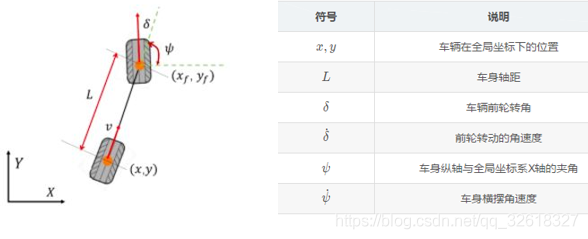
的方向前进,无侧向滑动 由上述假设可得自行车模型的运动微分方程如下式: 纯跟踪控制算法 纯跟踪控制算法(Pure Pursuit)是一种典型的横向控制方法,最早由 R. Wallace 在1985年提出,该方法对外界的鲁棒性较好。 该算法的思想: 基于当
2023-11-15 16:16
Projection Pursuit、RD关联规则 Association RuleAprioriEclat3.4 增强学习 Reinforcement Learning在之前的讨论中,我们总是给定一个样本x
2018-07-26 15:37