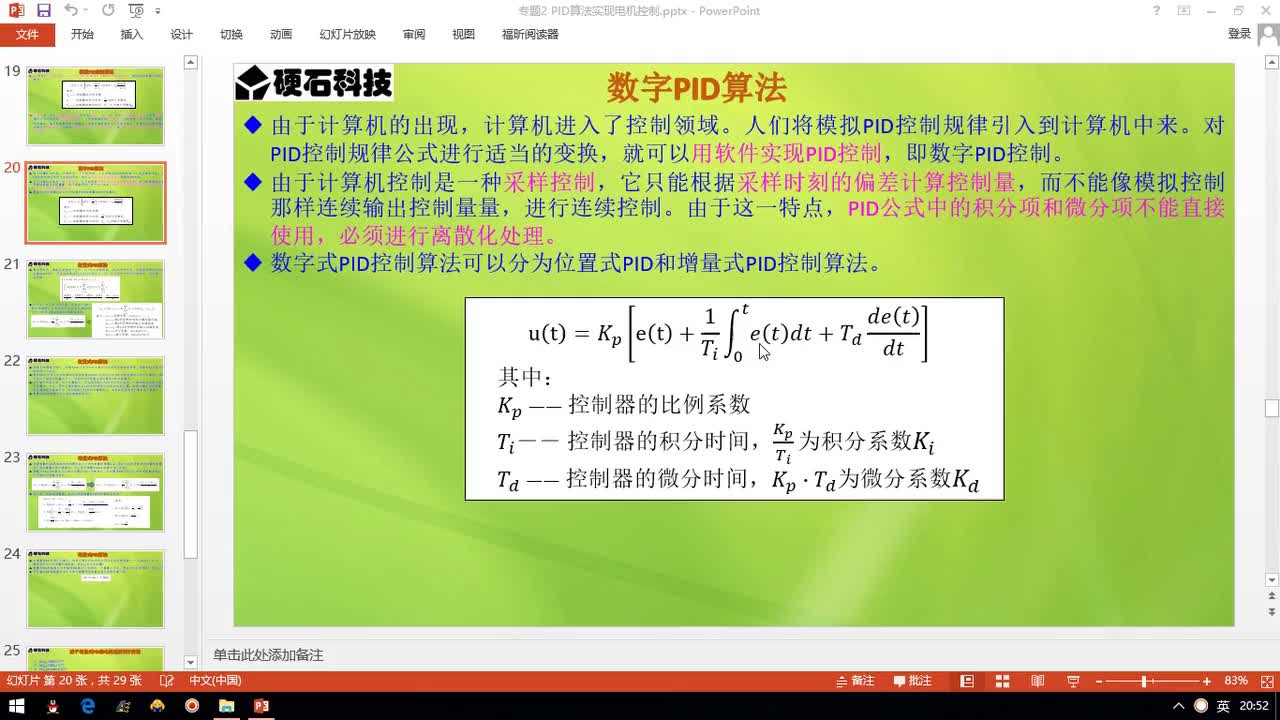
目录一. 绪论二. 角度环串级PID原理1. PID基本算法2. 姿态角串级PID原理三. 如何用STM32实现角度-角速度的串级
2021-08-17 06:44
PID算法的代码实现 舵机控制 在对舵机的控制中,我采用的是位置式PD算法。 将左右电感的偏差值赋给error,再代入公式进行解算,最后传给舵机输出子函数,控制舵机正确
2023-11-28 15:57
在直流有刷电机的基础驱动中,如果电机负载不变,我们只要设置固定的占空比(电压),电机的速度就会稳定在目标范围。
2023-03-23 12:32
C51实现PID算法代码真正要用PID算法的时候,发现书上的代码在我们5
2013-01-10 14:27
本文档的主要内容详细介绍的是使用使用C语言实现51单片机中的PID算法代码免费下载。
2019-09-25 17:17
本帖最后由 低调的牛_ 于 2017-7-24 20:07 编辑 1.PID常用口诀: 参数整定找最佳,从小到大顺序查,先是比例后积分,最后再把微分加,曲线振荡很频繁,比例度盘要放大,曲线漂浮
2017-07-24 20:02
分享一篇在其他地方看的分享的飞思卡尔控制电机PID算法代码解析的,写得非常的好。PID实指“比例proportional”、“积分integral”、“微分deriva
2014-11-04 11:59
PID算法原理、调试方法及源代码
2021-07-06 10:25