
机械臂抓取摆放及堆叠物体是智能工厂流水线上常见的工序,可以有效的提升生产效率,本文针对机械
2023-06-12 11:25
基于YOLOv3等的机械臂药盒智能抓取方法
2021-06-23 15:43
自主抓取是指,在没有人为干预的情况下,视觉机械臂系统通过摄像头获取到目标物体的位置,并且通过驱动机械臂来完成对于目标物体
2023-08-15 11:29
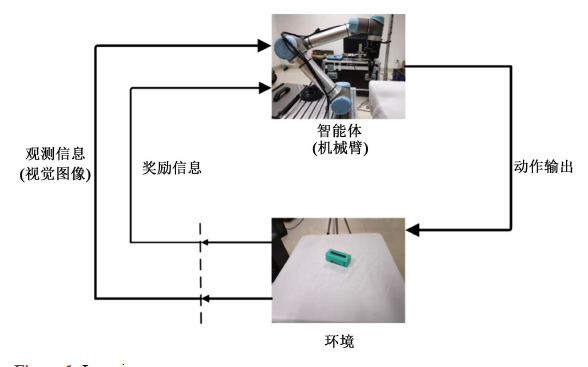
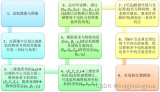
针对提高视觉图像特征与优化控制之间契合度的问题,本文提出一种基于深度强化学习的机械臂视觉抓取控制优化方法,可以自主地从与环境交互产生的视觉图像中不断学习特征提取,直接地将提取的特征应用于
2018-12-19 15:23
,识别不同颜色的目标;其次,将颜色信息发送到Arduino单片机;最后,利用Arduino单片机控制大型机械臂跟踪运动目标并进行抓取。将定位装置安装到矿山机器人上进行测
2017-11-16 16:27
基于RGB-D相机与机械臂的三维重建无序抓取系统有哪些关键技术?如何去开发一款基于RGB-D相机与机械臂的三维重建无序
2021-09-08 06:12
本文将多指手和关节型机械手臂结合起来,应用多种传感器,组成了仿人臂- 手系统。对多种抓取模式进行了分析,提出了主动抓取目标物体的策略,即将孩童
2009-07-11 10:59
机器人视觉抓取的目的是使用一个机械手模型(包括二指或多指夹爪,吸盘等),以RGB或RGBD相机采集的场景图像为输入计算出一个最优的抓取位姿,使机械手在该位姿下可以稳定地
2023-02-13 11:29

