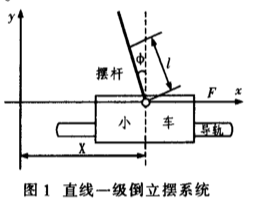
倒立摆控制系统(InvertedPendulumSystem简称IPS)是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。对倒立摆
2017-11-27 16:36
概述 倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。对倒立摆系统的研究能有效的反映控制中
2010-08-05 15:26
建立直线一级倒立摆的仿真模型如图3所示。“GLlIPState—Space”为直线一级倒立摆的状态空间模型。双击图3中的“Poles Control”模块,打开图4中的
2020-05-03 18:11

倒立摆系统在控制理论研究中是一种较为理想的实验装置。倒立摆系统可以用多种理论和方法来实现其稳定控制,如PID、自适应、状态反馈、智能控制、模糊控制及人工神经元网络等多种
2020-05-03 10:29

引言 倒立摆系统在控制理论研究中是一种较为理想的实验装置。倒立摆系统可以用多种理论和方法来实现其稳定控制,如PID、
2009-01-01 21:05
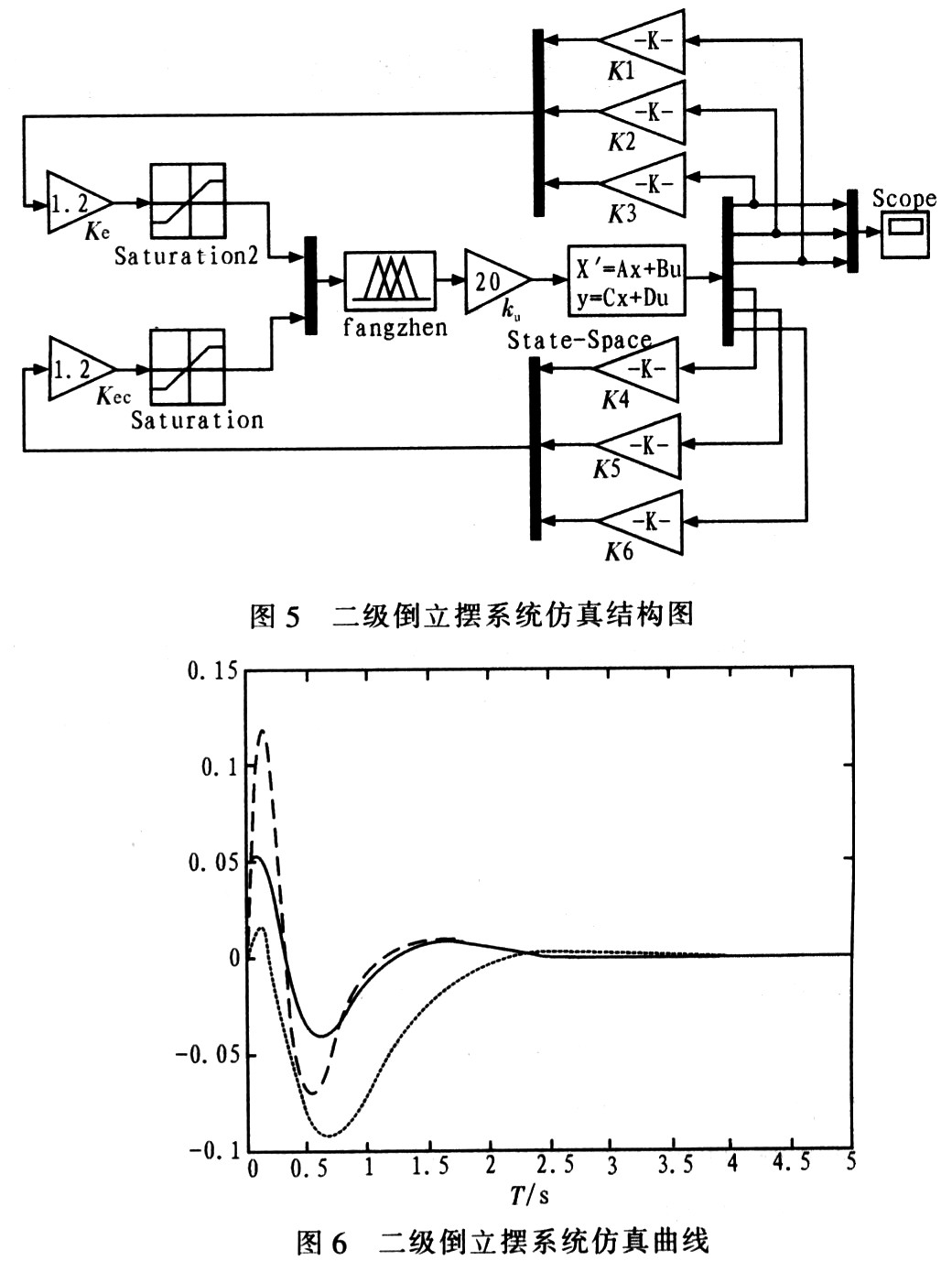
二级倒立摆的模糊控制研究 1 引言 在控制理论发展的过程中,某一理论的正确性及实际应用中的可行性都需要一个按其理论设计的控制器控制一个
2009-12-23 09:53

自动起摆控制器Swing-up Controller能够控制直线一级倒立摆由静止下垂的稳定平衡状态自动转化到竖直向上的不稳定平衡状态,而无需给摆杆施加力的作用,就可以实
2019-08-23 08:05

倒立摆系统的整定是自动控制理论中的典型问题,在网路上或者书籍中可以找到不少相关的资料知识,整定算法也多式多样,模糊PID、LQR、以及本文用到的PID等。
2023-12-08 14:05
本文利用拉格朗日方程建立了直线一级倒立摆控制系统的数学模型,在此基础上分析了该系统的性能,并利用LQR控制器进行控制。结果表明,LQR控制器对该系统具有良好的控制作用
2011-03-31 10:38

本文针对本科自动控制原理课程设计中倒立摆摆杆偏角控制器的在线仿真存在。
2012-04-23 10:43