JetBot 小车使用的电机驱动模块上用了 PCA9685 扩展 I/O ,一边与主控通过 I2C 总线通信,另一边连接 TB6612 马达驱动芯片。
2020-09-26 09:49
本文介绍了PCA9685主要特性和优势,方框图以及典型应用电路图和LCD背光应用电路图.NXP公司的PCA9685是16路12位PWM不是Fm+I2C总
2010-09-11 15:05
这是一个采用i2c通信 ,内置了PWM驱动器和一个时钟。这意味着,这将和TLC5940系列有很大不同。你不需要不断发送信号占用你的单片机!它是5V的兼容,这意味着你还可以用3.3V单片机控制并且安全地驱动到6V输出(当你想控制白色或蓝色指示灯用3.4+正电压也是可以的)6地址选择引脚使你可以把62个驱动板挂在单个i2c总线上,总共有992路PWM输出。那将是非常庞大的资源。
2017-11-19 10:15

用微控制器代替PCA9685 PWM发生器。之前版本采用PCA9685芯片产生PWM,但其每个通道的频率不能独立控制,给马达和舵机带来问题。Navio2采用微控制器代替,可以按组设置每个输出通道的频率,解决这个问题。
2023-06-02 17:06
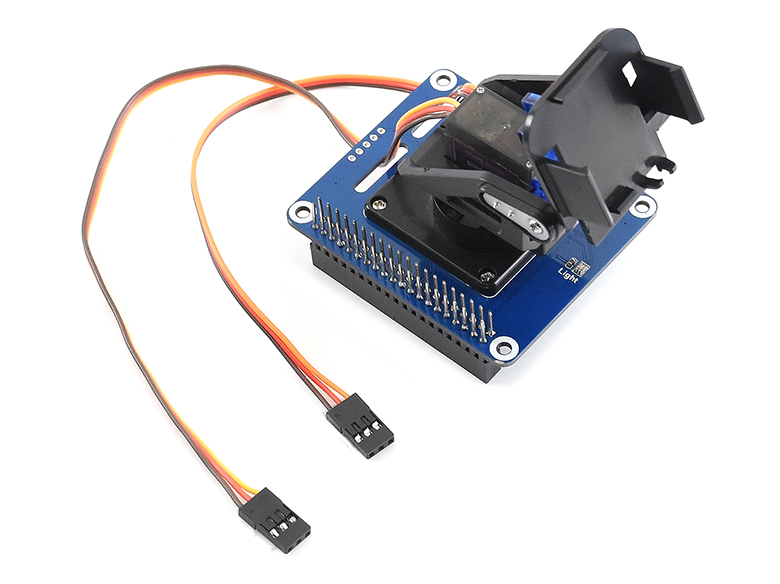
我是专为树莓派设计的两自由度云台扩展板,板载PCA9685芯片和TSL2581环境光传感器,通过I2C接口控制即可实现云台转动和光强检测。
2019-11-11 14:24

波形发生器从最早的555芯片是通过电阻电容比例调节来控制输出波形,1个555是输出1路波形。然后出现单片机通过调节定时器来输出各种波形,输出精度高,可以多通道。
2023-05-18 10:17
Seeed STM32MP157C EVK开发板试用报告概述安装系统和必要的系统工具包 通过SD卡烧写系统 升级系统 常规软件安装 PC机工具软件通过GPIO控制小灯闪烁通过I2C同PCA9685
2020-10-30 17:06
MATLAB实现PCA算法 PCA(Principal Component Analysis)是一种经典的线性降维方法,其基本思想是将高维数据映射到低维空间中,使得映射后的数据具有更好的可解释
2023-06-16 17:10
基于STM32f103的机器人控制核心板,包含8路舵机,4路电机,4路串口,1路蓝牙,4路拓展IO口,A4950驱动电机,最高支持5V5A的舵机驱动,利用PCA9685输出PWM信号,仅支持SWD
2020-12-07 09:53
提到PCA,可能有些人会想到MDA(Multiple Discriminate Analysis,多元判别分析法),这两者都是线性变换,而且很相似。只不过在PCA中,我们是找到一个成分(方向)来把
2018-08-30 17:47