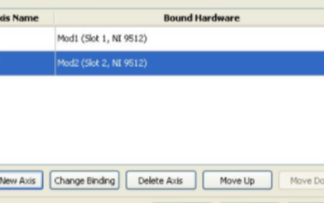
使用基于PLCOpen IEC 1131-3规范的高级函数模块API的运动轮廓编程的易用性。除了对全新NI C系列驱动器接口的本地支持之外,NI SoftMotion技术还提供了轴界面节点,可以用来添加专用I/O、定制
2020-08-17 13:40
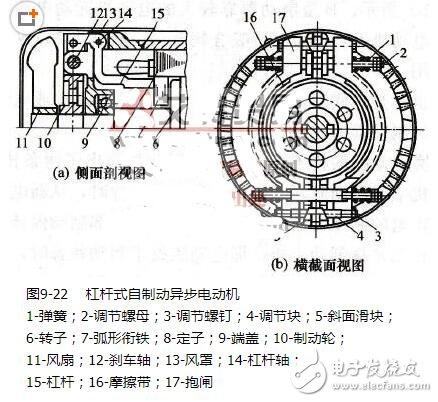
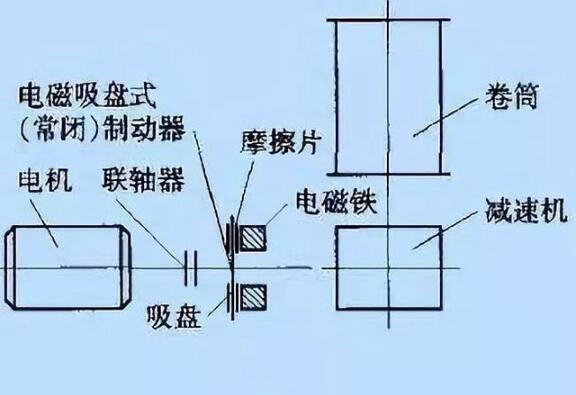
制动装置安装在电动机非轴伸端的端盖上,它由制动轮和抱闸组成。制动轮和轴装在一起,抱闸装在端盖上,其夹紧力由弹簧产生。
2019-11-27 10:02
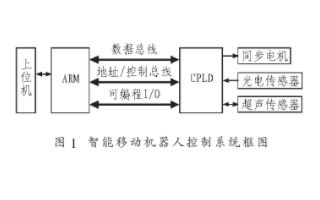
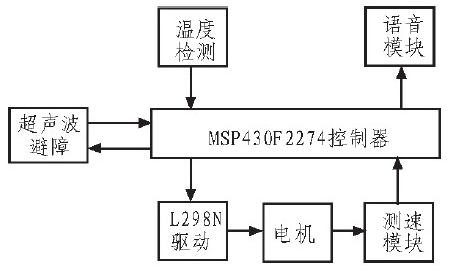
该系统设计的轮式移动机器人机械导航结构采用四轮差速转向式的机械机构,前面两个轮是随动轮,起支撑作用,后面两个轮是驱动轮,由两台同步电机驱动,分别控制两个驱动轮的转速,可使机器人按照不同方向和速度移动,运动灵活,可控性
2020-03-29 10:44
发动机输出的动力,是要经过一系列的动力传递装置才到达驱动轮的。发动机到驱动轮之间的动力传递机构,称为汽车的传动系,主要由离合器、变速器、传动轴、主减速器、差速器以及半轴等部分组成。
2019-11-04 10:06
锥形转子电动机定子内腔和转子外形都呈锥形。其锥形制动环镶于风扇制动轮上,静制动环镶在后端盖上。定子通电后,产生旋转磁场,同时产生轴向磁拉力,使转子轴向移动并压缩弹簧,使风扇制动轮上的锥形环与静制动环
2021-02-23 16:42
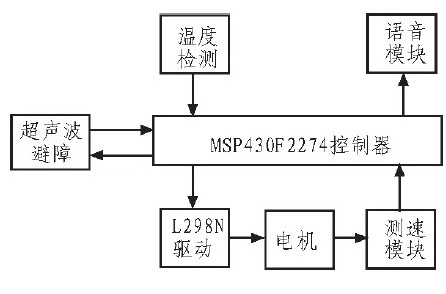
该系统主要由MSP430控制器,超声波避障模块,电机驱动,测速,语音模块,温度模块,小车的机械运动部分采用四轮差速转向式结构,前2个轮是驱动轮,分别由电机控制其运动,后两轮为随动轮。
2018-10-23 15:43
该系统主要由MSP430控制器,超声波避障模块,电机驱动,测速,语音模块,温度模块,小车的机械运动部分采用四轮差速转向式结构,前2个轮是驱动轮,分别由电机控制其运动,后两轮为随动轮。
2020-01-06 15:29
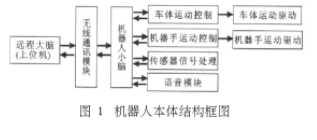
1998年日本东京大学井上研究所提出的“远程脑”概念,是移动机器人控制体系结构的进步。近年来,移动机器人的应用领域和应用范围正逐渐拓宽,全方位移动机器人由于具有平面运动的全部三个自由度,理论上可以在任何角度以任何速度在机器人所处平面上运动,因此具有广阔的应用前景和良好的社会效益。
2021-04-13 14:05
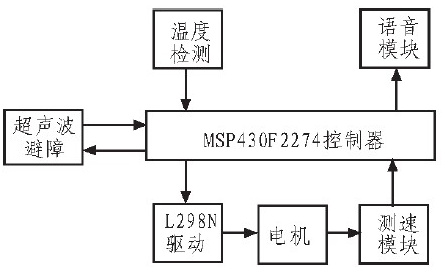
该系统主要由MSP430控制器,超声波避障模块,电机驱动,测速,语音模块,温度模块,小车的机械运动部分采用四轮差速转向式结构,前2个轮是驱动轮,分别由电机控制其运动,后两轮为随动轮。采用
2019-10-04 17:15
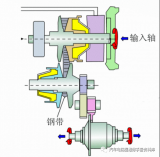
于固定数量的齿轮比。相反,它使用两个锥形的脉冲轮(也称为副轮),其中一个是驱动轮(输入),另一个是驱动轮(输出)。
2023-06-26 09:59