mpu6050常用作提供飞控运行时的姿态测量和计算。本文首先介绍了MPU6050姿态解算的原理,其次详细的介绍了mpu6050姿态解算
2018-03-09 09:15
InvenSense公司的三轴陀螺仪MPU6050测试程序。IIC接口,51单片机驱动,LCD1602同步显示。
2017-11-07 14:01
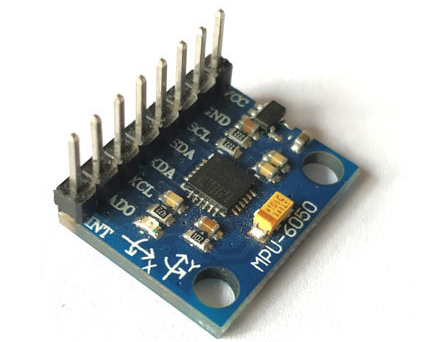
MPU6050是一款 集成 了 IC 3 轴加速度计和 3 轴陀螺仪的 单元。它还包含一个温度传感器和一个 DCM 来执行复杂的任务。MPU6050 常用于构建无人机和其他远程机器人,如自平衡机器人。在这个项目中,我们将使用
2022-08-31 15:42
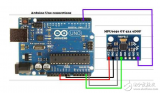
为避免纠缠于电路细节,我们直接使用集成的MPU6050模块。MPU6050的数据接口用的是I2C总线协议,因此我们需要Wire程序库的帮助来实现Arduino与MPU6050
2017-11-07 14:25
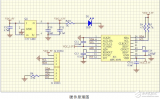
MPU6050模块,如图 1所示。该模块集成了一片MPU6050芯片和一片STM8S003F3P6单片机,具有串口和I2C接口。MPU6050中的DMP(数字运动处理器)对姿态进行融合,STM8
2017-11-07 14:06
本文开始介绍了mpu6050的定义和mpu6050的感测范围,其次阐述了mpu6050特征,最后介绍了mpu6050与单片机的连接方法。
2018-03-09 08:42

本文开始阐述了卡尔曼滤波的概念,其次阐述了卡尔曼滤波的性质与卡尔曼滤波的应用,最后介绍了mpu6050卡尔曼滤波分析及mpu6050卡尔曼滤波输出姿态角程序。
2018-03-09 08:57

本文主要介绍了mpu6050姿态解算原理分析及程序设计,MPU6050硬件DMP解算姿态是非常简单的,四元数法只求解四个未知量的线性微分方程组,计算量小,易于操作,是比较实用的工程方法。
2017-12-11 13:51

本文为大家分享了mpu6050六轴传感器模块驱动程序源代码,STM32F1读取MPU6050的加速度和角度传感器数据的初始化步骤,以及
2017-12-11 14:26
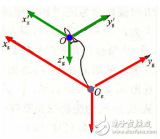
介绍了mpu6050姿态融合原理及程序代码分析,MPU6050是一款姿态传感器。主要介绍三种姿态融合算法:四元数法、一阶互补算法和卡尔曼滤波算法。
2017-12-11 13:31