
本文论述了由MEMS加速度计和MR传感器组成的姿态测量系统。在本系统中,三轴MEMS加速度计用来获得载体基于重力向量的俯仰角和横滚角,而三轴MR传感器的输出经过以俯仰角和横滚角为参数的矩阵变换后可以给出载体相对于地磁
2018-03-12 16:27
基于MEMS姿态传感器主要用于载体姿态的调整和倾角的检测,但是由于工作环境温度的改变,就会导致测量精度的变化,在一些高精度检测的要求下,则失去其检测的效果,所以必须采取相应措施来消除或者减少随温度
2014-05-07 10:06

传统的姿态测量因为采用高精度陀螺仪和加速度计等姿态传感器,体积庞大并且价格昂贵。当前MEMS产品因其体积小、价格低、功耗低,被称为是传统的惯性测量组合的一次重大改革,越来越多地应用于
2018-08-09 16:46

在工程机械、卫星天线、桥梁监测等领域,精准的姿态测量和角度控制至关重要。ER-3MG-041超小尺寸三轴寻北MEMS陀螺仪,凭借其紧凑设计、高精度和卓越稳定性,成为各类惯性导航和姿态测量的理想选择。它不仅体积小巧、重
2025-08-01 15:47 陕西艾瑞科惯性技术有限公司 企业号

大家好,接下来会为大家开一个树莓派5和YOLO的连载文章。内容包括四个部分:在树莓派5上使用YOLO进行物体和动物识别-入门指南在树莓派5上开启YOLO人体姿态估计识别之旅YOLO物体检测在树莓派
2025-07-18 15:31 上海晶珩电子科技有限公司 企业号
姿态传感器是基于MEMS技术的高性能三维运动姿态测量系统。它包含三轴陀螺仪、三轴加速度计,三轴电子罗盘等运动传感器,通过内嵌的低功耗ARM处理器得到经 过温度补偿的三维姿态
2019-12-25 10:36
光照变化是影响人脸识别性能的最关键因素,对该问题的解决程度关系着人脸识别实用化进程的成败。研究思路是将在对其进行系统分析的基础上,考虑对其进行量化研究的可能性,其中包括对光照强度和方向的量化、对人脸反射属性的量化、面部阴影和照度分析等等。
2018-07-30 14:43

本文主要介绍了基于STM32的四旋翼飞行姿态串级控制的设计与实现,行器控制器通过处理微型MEMS惯性器件和三维地磁传感器采集的数据,计算飞行器的姿态角,并根据飞行指令,结合相应的控制律给出适当的控制信号,控制飞行器
2017-12-23 15:24
mpu6050常用作提供飞控运行时的姿态测量和计算。本文首先介绍了MPU6050姿态解算的原理,其次详细的介绍了mpu6050姿态解算程序。
2018-03-09 09:15
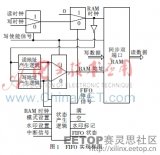
通过在 MEMS 信号处理电路中设计一个异步结构的 FIFO ,可以有效地降低系统对MEMS的频繁访问。设计一个具有多种工作模式的FIFO,可以满足一些特殊的姿态检测需求,更好地满足系统智能化操作需要。实现了一个具体
2018-05-05 09:13