
首先,这里跑linux主要是PS部分的,这里暂时不用PL部分。 打开vivado新建一个project. 项目名和保存路径 RTL project next next next 选Board,如果选
2018-06-29 09:36
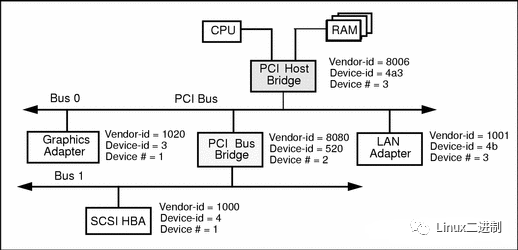
在对zynq进行Linux驱动开发时,除了需要针对zynq内ARM自带的控制器适配驱动外,还需要对zynq PL部分的IP核进行驱动开发。对于ARM来说,zynq PL部分的IP核就是一段地址空间
2018-06-30 15:10

相机的成像过程涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。这篇博客介绍相机的成像过程,以及四个坐标
2023-07-03 10:30

解复位就是复位撤离,系统解复位就是复位结束了系统准备开始工作。
2023-11-28 12:20
在Linux内核2.6.13-rc3以前,驱动和设备之间的绑定和解绑只能通过insmod(modprobe)和rmmod来实现,但是这种实现方法有一个弊端,就是一旦绑定或者解绑定都是针对驱动与其
2023-11-17 17:11

世界坐标系:在OpenGL中,世界坐标系是以屏幕中心为原点(0, 0, 0),且是始终不变的。你面对屏幕,你的右边是x正轴,上面是y正轴,屏幕指向你的为z正轴。长度单位这样来定:窗口范围按此单位恰好是(-1,-1)到(1,1),即屏幕左下角坐标为(-1,-1),右
2018-05-04 09:00
mpu6050常用作提供飞控运行时的姿态测量和计算。本文首先介绍了MPU6050姿态解算的原理,其次详细的介绍了mpu6050姿态解算程序。
2018-03-09 09:15

目前域控项目有的采用S32G这类多核异构的芯片,转载一篇分析下多核异构中A核与M核通信过程的文章。
2023-10-31 11:09
热解粒子探测器与某些类型的火灾探测器在功能和原理上有相似之处,但并非完全等同。以下是一些与热解粒子探测器相似的探测器类型及其相似点: 烟雾探测器 : 相似点 :两者都关注火灾早期产生的物质变化。烟雾
2024-09-25 14:57
导弹在大攻角飞行过程中,通道间存在严重的气动耦合。工程设计上,通常把较小的耦合项作为随机干扰来处理,但当耦合影响较大时,容易使控制系统丧失稳定性,因此必须考虑通道间的耦合效应,并对其解耦。近年来
2020-05-17 10:35