
在实际控制中,相机检测到目标在图像中的像素位置后,通过标定好的坐标转换矩阵将相机的像素坐标变换到机械手的空间坐标系中,然后根据机械手坐标系计算出各个电机该如何运动,从而控制机械手到达指定位置。这个过程中涉及到了图像标定,图像处理,运动学正逆解,手眼
2020-08-28 11:42
使用LabVIEW和用于DENSO的ImagingLab Robotics库,机器视觉和机器人系统可以集成在一个应用程序中。本文介绍了使用相同坐标系统在机器视觉系统和机器人系统之间进行标定的方法
2017-11-17 17:03
压力、位移等)作为输入量,这些标准量将用于标定传感器。 二、标定过程 分点 : 将传感器的全量程分成若干个等间距点。这些点将作为标定过程中的输入量参考点。 正向
2024-09-19 17:02
相机标定可以归纳为P−n−P(Perspective-n-Point)的问题,即已知三维物点坐标和对应的二维投影坐标,求解相机参数。由于镜头的畸变(径向和切向)带来非线性成像模型,一般求解方法分为两步:
2022-12-21 09:52

这个逼近的过程就是「相机标定」,我们用简单的数学模型来表达复杂的成像过程,并且求出成像的反过程。标定之后的相机,可以进行三维场景的重建,即深度的感知,这是计算机视觉的一大分支。
2023-10-18 17:00

在选择标定板时,一个重要的考虑因素是它的物理尺寸。这最终关系到最终应用的测量视场(FOV)。这是因为相机需要聚焦在特定的距离上标定。改变焦距长度会轻微地影响对焦距离,这会影响之前的标定。即使是光圈的改变通常也会对
2023-11-25 14:36
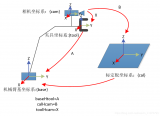
机械手搭载双目相机,手眼标定。
2023-07-11 11:18

零点标定可通过确定轴的机械零点的方式进行。在此过程中轴将一直运动,直至达到机械零点为止。这种情况出现在探针到达测量槽最深点时。因此,每根轴都配有一个零
2023-09-23 09:20
嵌入式系统中往往包含大量的可标定参数,这些参数通常以单值、曲线(1 维表格)、MAP 图(2 维表格)的形式存在。最终产品的质量不仅取决于算法的设计,也取决于这些可标定参数的值设置是否达到最优。
2024-09-05 09:54
蓝牙信标定位有什么用?
2021-07-28 14:11