使用LabVIEW和用于DENSO的ImagingLab Robotics库,机器视觉和机器人系统可以集成在一个应用程序中。本文介绍了使用相同坐标系统在机器视觉系统和机器人系统之间进行标定的方法
2017-11-17 17:03
三维空间的任意旋转,都可以用绕三维空间的某个轴旋转过某个角度来表示(即轴角,Axis-Angle表示方法)。
2023-01-06 15:35
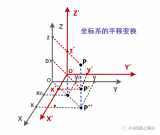
这次的文章,我们来看一看三维空间直角坐标系的平移和旋转变换,尽管这个内容早已见诸文献资料,但自己在看书籍以及期刊论文时,总是遇到让人百思不得其解的事情,就是不同的文献给出的同类型的旋转矩阵居然有不一样的,这让小D对文
2023-12-18 09:48

相机的成像过程涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。这篇博客介绍相机的成像过程,以及四个
2023-07-03 10:30

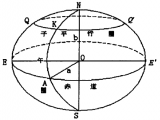
今天我们要讲的是应用于卫星通信领域的一个坐标转换过程——机体坐标系与ENU坐标系的转换。
2023-12-27 09:30

世界坐标系:在OpenGL中,世界坐标系是以屏幕中心为原点(0, 0, 0),且是始终不变的。你面对屏幕,你的右边是x正轴,上面是y正轴,屏幕指向你的为z正轴。长度单位这样来定:窗口范围按此单位恰好是(-1,-1)到(1,1),即屏幕左下角
2018-05-04 09:00
结构类型 FRAME 的变量指明基于 WORLD 坐标系的 ROBROOT 坐标系位置。
2022-10-26 11:16
测量坐标转换一般包括两方面的内容:坐标系转换和坐标基准转换。同一坐标基准下,空间点不同表现形式的转换叫做坐标系转换。
2024-04-01 14:33
ABB机器人如何建立外部TCP,一般情况下我们的工具是安装在机械手法兰盘上的,工件装在本体之外。工具坐标也是也是以tool0为基础所衍生出来的坐标,工件坐标以wobj0
2019-11-02 05:56
