近年来,随着工程测量服务领域的不断拓宽以及三维设计制造对测量精度的要求,传统的测量仪器如全站仪、断面仪等已不能满足高精度的三维坐标采集和“逆向工程”的需要。相比这些传统的测量技术,
2018-03-02 15:20
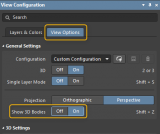
PCB三维视图中的三维主体模型显示通过View Configuration Panel中的设置控制。我们将简单介绍如何确保该选项被启用。
2023-04-28 15:48

)可获取物体到相机的距离信息,加之2D平面的X,Y坐标,可计算出每个点的三维坐标,进行三维重建、目标定位、识别等应用。
2023-07-06 10:22
三维激光扫描技术又被称为实景复制技术,是测绘领域继GPS技术之后的一次技术革命。它突破了传统的单点测量方法,具有高效率、高精度的独特优势。三维激光扫描技术能够提供扫描物体表面的三维点云数据,因此可以用于获取高精度高分
2018-03-02 15:43
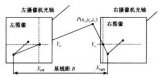
双目立体视觉是基于视差,由三角法原理进行三维信息的获取,即由两个摄像机的图像平面和北侧物体之间构成一个三角形。一直两个摄像机之间的位置关系,便可以获得两摄像机公共视场内物体的三
2018-04-11 14:32
点云是世界的一种非结构化三维数据表示,通常由激光雷达传感器、立体相机或深度传感器采集。它由一系列单个点组成,每个点由 x、y 和 z 坐标定义。
2024-10-29 09:21
将工件成品的三维模型和三维设计数模进行坐标对齐,然后进行偏差对比分析,判断其偏差是否在容差范围内,并输出工业检测报告。
2019-12-28 10:42
三维计算视觉研究内容包括: 1)三维匹配 :两帧或者多帧点云数据之间的匹配,因为激光扫描光束受物体遮挡的原因,不可能通过一次扫描完成对整个物体的三维点云的获取。因此需要从不同的位置和角度对物体进行
2023-06-19 11:06

在机器视觉和机器人领域的许多前沿应用中,学习准确且高效的三维形状表达是十分重要的。然而,现有的基于三维坐标的隐式表达在表示三维形状或是渲染二
2023-11-17 16:23
