从现在开始我们认为你已经设置好了IMU模块并能计算出正确的Axr,Ayr,Azr值(在第一部分加速度计中定义)以及RateAyz,RateAyz(在第二部分陀螺仪中)。下一步,我们分析这些值之间的关系并得到更准确的设备和地平面之间的倾角。
2018-03-13 09:12

对于复杂且高动态惯性配置的MEMS IMU应用,评估功能时需要考虑许多属性。在设计周期早期评估这些属性优于追逐开放性成果,从而实现“尽可能精确”。
2018-07-11 10:33
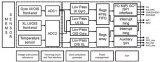
本文将首先简要介绍 IMU 的用途,接着介绍 STMicroelectronics 的 LSM6DSO。然后,借此器件阐释在 IMU 中添加和集成机器学习与决策树处理功能后,为何能为主机应用处理器分担实时位置和运动处理,以及如何在实际应用中使用这些功能。
2019-06-29 09:39

传感器未对准通常是在其反馈回路中使用MEMS惯性测量单元(IMU)的高性能运动控制系统的关键考虑因素。对于IMU中的陀螺仪,传感器未对准描述了每个陀螺仪的旋转轴与系统定义的惯性参考系(也称为全局系)之间的角度差。
2023-01-08 20:05
惯性测量单元Inertial measurement unit,简称IMU,是测量物体三轴姿态角(或角速率)及加速度的装置。陀螺仪和加速度计,是惯性导航系统的核心装置。借助内置的加速度传感器和陀螺仪,IMU可测量来自三个方向的线性加速度和旋转角速率,通过解算可获得
2019-10-04 17:12

在阅读论文 《A Robust and Easy to Implement Method for IMU Calibration without External Equipments》的时候了解到
2023-05-24 17:28

我们经常会看到DOF,自由度的概念, 今天我们就从DOF开始进一步理解IMU的基础知识和应用场景。
2019-06-01 11:07

对于在反馈环路中采用MEMS惯性测量单元(IMU)的高性能运动控制系统,传感器对准误差常常是其关键考虑之一。
2016-11-05 03:56
IMU3000采用7”彩色触控屏,旋钮输入,EMC-PARTNER操作系统(EPOS),一种新的图形化人机互动理念。 用户可配置一种或多种干扰源,完整的模块化设计,根据需要扩展系统。组合波、振铃波和电信波都可达8kV,EFT可达6kV。
2019-03-28 13:56

在当今快速发展的无人机技术领域,测绘巡检机载挂载已成为实现高效、精确地理信息采集的关键工具。随着城市化进程的加快和基础设施的日益复杂,对于高精度、高稳定性的测绘需求日益增长,这使得IMU(惯性测量
2025-03-05 17:38 Piezoman压电侠 企业号