具有单轴力传感器的单关节机械臂接触力估计: 接触力估计需要考虑多个因素进行补偿,以提高估计的准确性。以下是一些常见的补偿因素: 1.重力补偿:机械臂在接触过程中会受到重力的影响,因此需要对测量到的力
2023-11-10 17:08
力控机器人本身关节具有力传感器,可为什么还需要接触力滤波和估计呢?这是不是有些多余?显然是不是的,本篇博文总结下力控机器人接触力滤波与估计的一些原因: 1.环境噪声和不确定性:在力控机器人与环境进行
2023-11-10 17:01
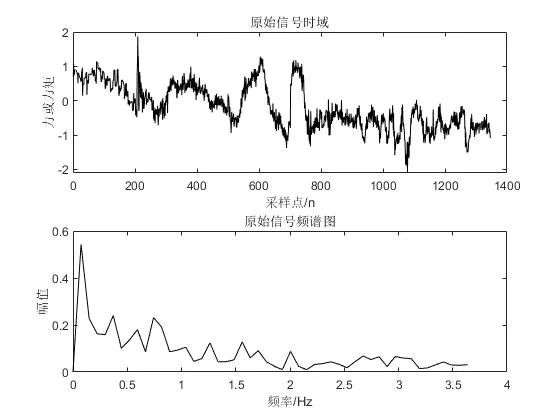
下面举一些例子,实现对机器人接触力的数据滤波! 首先是导入数据: clc clear all ; close all ; X = xlsread('E:程序test~六维力数据.csv');%导入
2023-11-10 17:23
汽车连接器所需的性能包括高接触力、位移形变小(下压行程有限但需高接触力)、折弯角度小(产品微型化)、交变应力不失效(高插拔次数)、较低的接触阻抗、好散热性及低温升、持久的高接触
2023-03-17 11:15
根据现场分析和测试数据,接触失效是连接器最主要的失效模式,占45.1%。接触电阻的增大和触点的瞬间断开是这种故障形式的主要表现。接触失效的主要原因是:接触力的变化、摩擦
2022-11-04 14:59
为实现与环境的安全、柔顺交互,需要将机器人期望动力学行为与接触环境所表现出来的特征进行匹配。定性地分析来看: 对于高刚度接触环境,期望机器臂体现出低阻抗行为(即强调对环境的顺应性,以避免过大
2023-11-22 15:59
器人在与环境互动时,接触力是一个关键因素。如果这个接触力过大或过小,都可能导致不良的后果。过大的接触力可能会导致对环境的损害,而过小的接触力则可能导致任务失败。 因此,
2023-11-08 16:18
Control):通过控制机器人的末端执行器的阻抗(包括质量、阻尼和刚度)来控制机器人与环境之间的相互作用力。 接触力控制(Force Control):通过控制机器人与环境之间的相互作用力,使得机器人在执行物理交互任务时能够保持稳定的力学特性,比如保持一定的
2023-11-14 14:47
触力传感器根据埋入硅片的压电电阻,在其受到任何外力而挠曲时,其电阻会增加的原理工作。该传感器通过不锈钢球,将施加的力直接集中到硅-传感元件上,电阻值的变化是随施加力的大小而成比例的变化。
2020-04-21 16:04
