
登录之后点击右上角+号,New repository创建仓库,之后填写仓库名称和其他选项。
2025-03-13 16:08

System Verilog调试布局由三部分组成。左上角Design Browser,可以访问仿真对象,右上角为Source Browser,用来展示源码,下侧窗口为Waveform window,用来显示波形。
2023-12-02 16:08

世界坐标系:在OpenGL中,世界坐标系是以屏幕中心为原点(0, 0, 0),且是始终不变的。你面对屏幕,你的右边是x正轴,上面是y正轴,屏幕指向你的为z正轴。长度单位这样来定:窗口范围按此单位恰好是(-1,-1)到
2018-05-04 09:00
速度倍率是决定机器人运动的实际速度的两个因素之一,以百分符号%来表示。当前的速度倍率在示教器屏幕的右上角显示。速度倍率为100%时,机器人以最快的速度倍率运动。
2018-07-24 10:55

1/16W(上图右上角)。被电阻阻挡的电流,都变成了热量。小小的一个电阻,热量如果不能及时散出去,就会过热、烧断。
2023-07-24 15:59
开机按DEL键进入BIOS,右上角选择高级模式(Advanced Mode),点击M-Flash,选择U盘中的BIOS文件,即可进入更新BIOS界面。几分钟后,更新完成。
2018-07-09 10:14
Harry在找到这个项目之后,点击右上角的「fork」按钮。稍等片刻后,就会在Harry的账号下克隆了一个一样的项目githubTest,包括文件、提交历史、issues、和其余一些东西。
2018-10-29 16:12
数据集看起来像一个从原点到右上角延伸的细长扁平的椭圆。要降低整个数据集的维度,我们必须把点映射成一条线。下图中的两条线都是数据集可以映射的,映射到哪条线样本变化最大?
2018-10-08 14:22
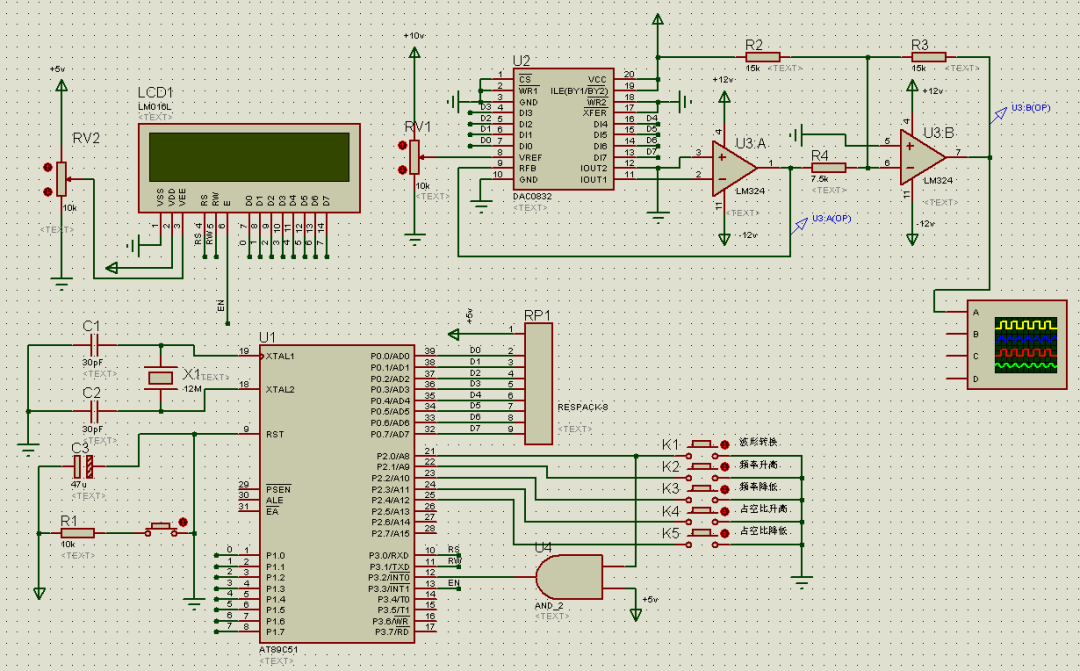
电路如下,左上角是一个LCD显示器,下面就是我们常用的单片机系统电路,当然这里的电路并非完全,现实中还要给单片机接上电源,但是仿真中完全不需要担心哦!右上角就是波形发生电路,采用了DAC0832,下面就是个示波器,方便我们观察仿真结果。
2023-11-09 09:55
从ChipRebel公布的麒麟980剖面图,可见左上角部分是配制全新Mali G76MP10 GPU,右上角则是主要CPU配置区,此区可见海思首次导入的「DynamlQ」CPU配置,并可见充分运用全新DynamIQ的
2018-11-13 14:35