以上图中的Type选取Timing为例,Reports一栏可以浏览到的报告如下图所示。这里,这些报告之所以可见,是因为事先在设置Implementation Settings时,将其中的Report Options对应的Strategy设置为Timing Closure Reports。
2019-01-08 12:01
Motor driver-HR8833 双路直流电机驱动模块,体积小,可以在面包板上使用,对于空间上有要求的的DIY作品也是个不错的选择哦。
2018-08-09 09:00
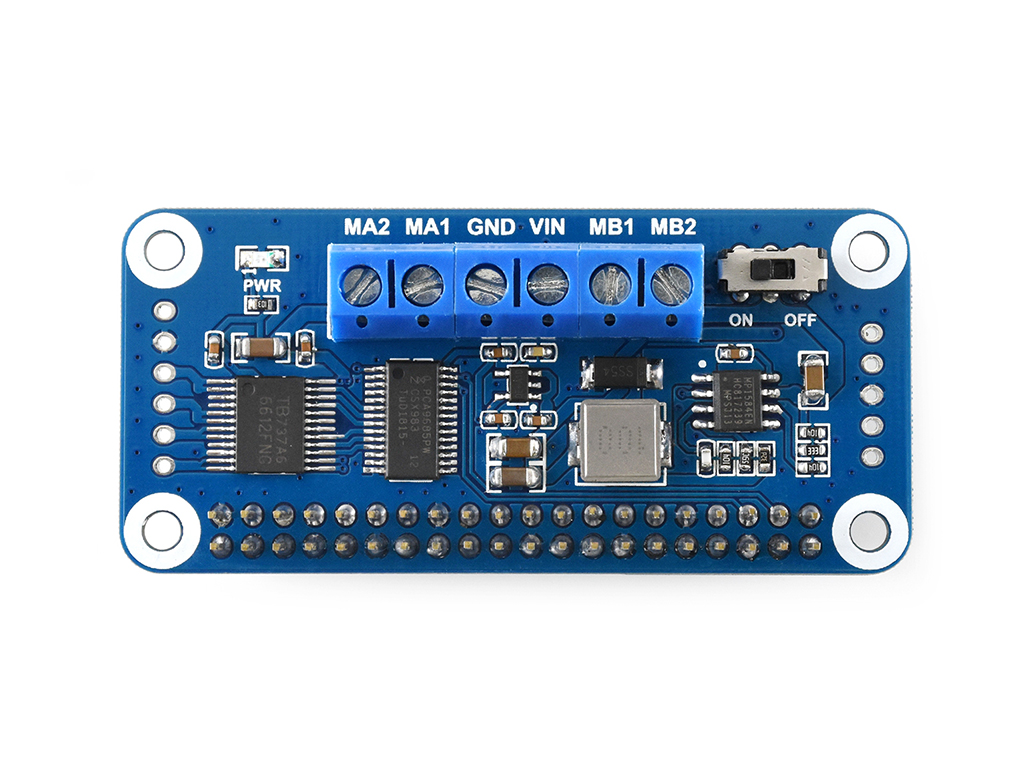
树莓派电机驱动板 - I2C接口 2路直流电机 工作高效 不易发热 预留I2C接口 (提供BCM2835、wiringPi与python例程) 型号 Motor Driver HAT
2019-11-12 16:49

树莓派舵机驱动板 16路12位分辨率 弯排针版 16路12位分辨率(4096级), 弯排针版 型号 Servo Driver HAT (B)
2019-11-13 15:12
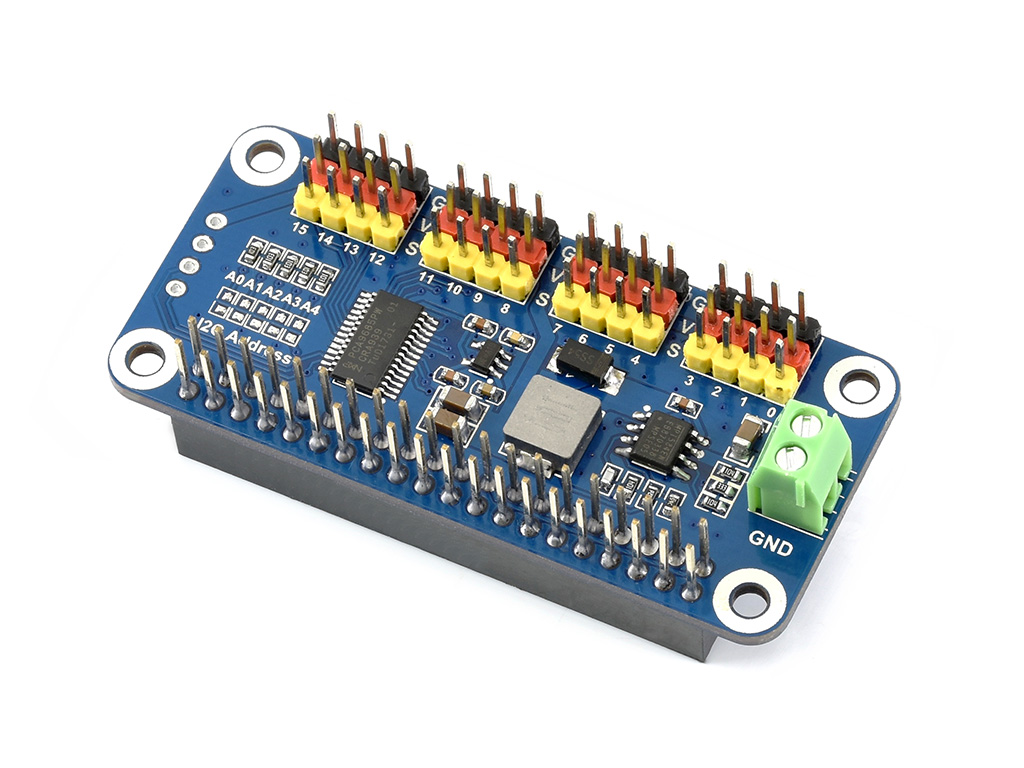
树莓派舵机驱动板 16路12位分辨率(4096级) I2C接口 直排针版 可控制16路舵机,每路12位分辨率,适合用于机械臂或六足等机器人舵机驱动。 型号 Servo Driver HAT
2019-11-13 15:14
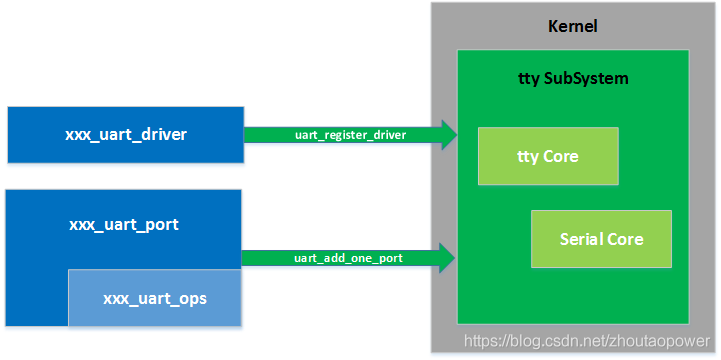
前两节我们介绍串口驱动的框架和tty core部分。这节我们介绍和硬件紧密相关的串口驱动部分。
2024-09-04 14:23
关于Vivado Dashboard的功能可阅读这篇文章(Vivado 2018.3这个Gadget你用了吗)Vivado 2019.1的Dashboard功能进一步增强。
2019-06-12 14:49

,Proof System。为了更好的生成R1CS电路,libsnark抽象出protoboard和gadget,方便开发者快速搭建电路。
2019-08-18 11:05
前段时间有客户在官方社区反映i.MX RT1170下,使用官方SDK里FlexSPI驱动去擦写Flash时不能很好地支持全局中断。 客户项目里用了两块NOR Flash,分别挂在不同的 FlexSPI上,一块Flash用于存储XIP代码(FlexSPI1),另一块Flash用于存储项目资源数据(FlexSPI2),显然这样的设计原理上是没有问题的,那为什么使能了中断会出问题呢?今天就来分析下这个问题。
2023-02-06 15:09
Differential Driver Output 在带负载的情况下最大是5V,但是Driver Output Voltage 最大是12.5V,所以在选用TVS管时,我都是选用13V的。
2022-08-06 15:38