如果您已经设置了数据管理并且使用的是AMX1001单元,则只需断开旧单元的连接并连接替换单元,即可更换EBOX。数据集位于下部(ABOX)的EPROM中。系统会自动识别何时连接了新的EBOX。数据集将自动复制到EBOX
2023-03-08 11:18

RRT 算法是一种对状态空间随机采样的算法,通过对采样点进行碰撞检测,避免了对空间的精确建模带来的大计算量,能够有效地解决高维空间和复杂约束的路径规划问题。 与PRM类似,该方法是概率完备且非最优的。可以轻松处理障碍物和差分约束(非完整和动力学)的问题,并被广泛应用于机器人路径规划。
2023-07-28 15:45
eBox开发平台是一款可直接编程的STM32开发板,让STM32的编程开发变得同Arduino编程一样简单。
2016-04-29 14:44
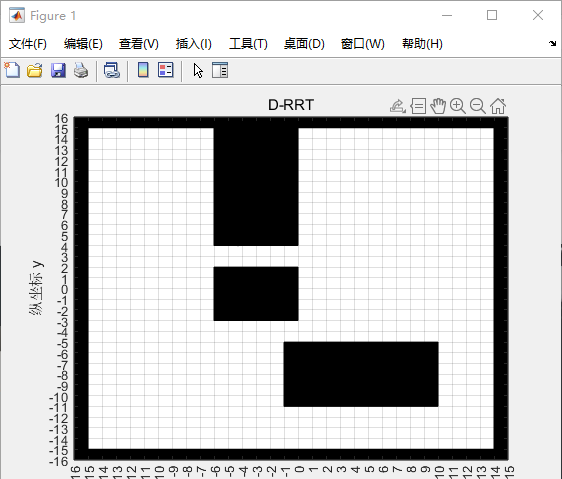
使用matlab2019来编写RRT算法,下面将贴出部分代码进行解释。 1、生成障碍物 在matlab中模拟栅格地图环境,自定义障碍物位置。 %% 生成障碍物 ob1 = [0,-10,10,5
2023-11-24 16:04
无人驾驶路径规划 众所周知,无人驾驶大致可以分为三个方面的工作:感知,决策及控制。 路径规划是感知和控制之间的决策阶段,主要目的是考虑到车辆动力学、机动能力以及相应规则和道路边界条件下,为车辆提供通往目的地的安全和无碰撞的路径。 路径规划问题可以分为两个方面: (一)全局路径规划:全局路径规划算法属于静态规划算法,根据已有的地图信息(SLAM)为基础进行路径规划,寻找一条从起点到目标点的最优路径。 通常全局路径
2023-11-24 15:57
初始化随机树 初始化随机树,定义树结构体tree以保存新节点及其父节点,便于后续从目标点回推规划的路径。 %% 初始化随机树 tree.child = []; % 定义树结构体,保存新节点及其父节点 tree.parent = [];tree.child = x_start; % 起点作为第一个节点 flag = 1 ; % 标志位 new_node_x = x_start( 1 , 1 ); % 将起点作为第一个生成点 new_node_y = x_start( 1 , 2 );new_node = [new_node_x, new_node_y]; 主函数部分 主函数中首先生成随机点,并判断是否在地图范围内,若超出范围则将标志位置为0。 rd_x
2023-11-24 16:25
众所周知,无人驾驶大致可以分为三个方面的工作:感知,决策及控制。
2022-11-08 11:13
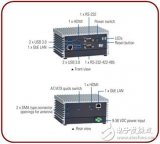
艾讯科技推出最新Intel® Skylake ULT无风扇嵌入式计算机系统eBOX565-500-FL,拥有IP40工业级防护、轻巧机身与丰富多元的扩充界面。搭载Intel® Core
2017-01-13 15:54
必要时可以根据实际运行情况关闭电压层 24V_S,以便集中关闭设备内的执行器 。
2023-02-02 09:31
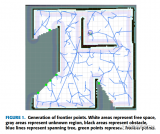
目标边界点的选择是有效探索的关键。以边界为基础的战略是由Yamauchi首先提出的。所使用的探索策略是识别当前地图中的所有边界区域,然后驱动机器人前往最近的边界点。
2023-06-19 10:17