
蓝线为真实路径,黑线为导航推测路径(dead reckoning trajectory),绿点为位置观测(如GPS),红线为PF估算的路径。该算法假设机器人能够测量与地标(RFID)之间的距离。
2023-05-05 14:36
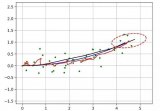
该算法利用扩展卡尔曼滤波器(Extended Kalman Filter, EKF)实现传感器混合本地化。 蓝线为真实路径,黑线为导航推测路径(dead reckoning trajectory),绿点为位置观测(如GPS),红线为EKF估算的路径。
2023-09-22 15:58

DCS原理概述
2018-04-15 10:09
音箱概述
2009-12-28 10:59
MicroBlaze概述
2018-11-28 06:09
认证与授权的标准概述
2011-03-19 17:12
线路主保护概述
2023-11-10 09:08
油墨概述 &n
2009-12-28 16:33

OpenHarmony生态共建概述 审核编辑:金巧
2021-12-28 14:13
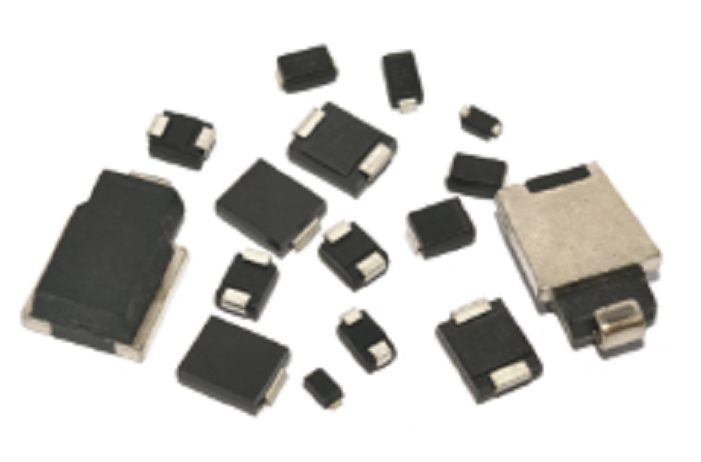
TVS器件的概述和应用!|深圳比创达电子EMC
2023-12-04 10:49