本文首先介绍了舵机的控制方法,其次阐述了Arduino控制舵机的两种方法,最后详细阐述了
2018-05-11 14:28
舵机:是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。
2023-11-02 10:12
本文首先介绍了舵机工作原理,其次阐述了舵机控制原理及舵机的追随特性,最后介绍了舵机的
2018-05-30 11:13
本文首先介绍了舵机的工作原理,其次介绍了舵机的控制方法,最后阐述了舵机的速度控制。
2018-05-11 15:51
本文主要阐述了舵机控制正反的方法及舵机的使用方法。
2020-03-21 10:05

DRI0027是DFRobot研发的世界首款Arduino兼容的数字化总线式伺服舵机驱动板,能够为您解决机器人舵机控制领域的许多难题。该驱动板是DFRobot针对博创C
2019-11-20 17:26
一、舵机怎么控制正反? 舵机的 “正反” 本质是 旋转方向的控制 ,但其方向逻辑与直流电机不同(并非通过电源正负极切换),而是通过 目标角度与当前角度的偏差 由内部电路
2025-08-19 10:52
当我们完成一些Arduino项目后,比如Arduino控制灯的项目或者Arduino控制
2022-03-31 16:40
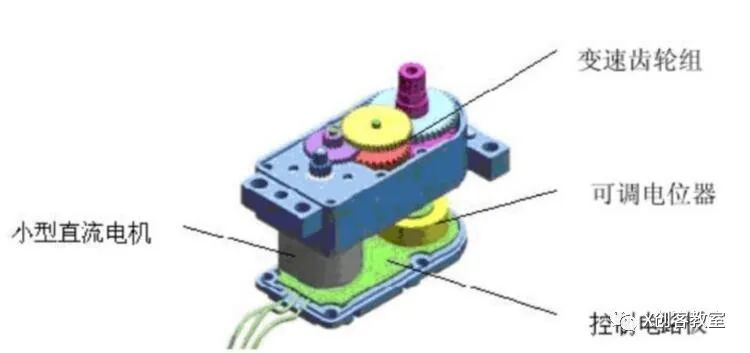
数字舵机(Digital Servo)和模拟舵机(Analog Servo)在基本的机械结构方面是完全一样的,主要由马达、减速齿轮、控制电路等组成,而数字舵机和模拟
2018-05-30 16:29
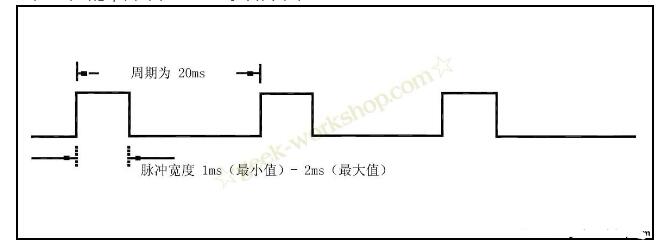
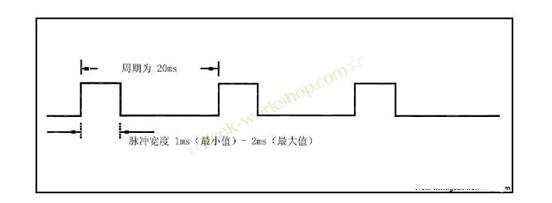
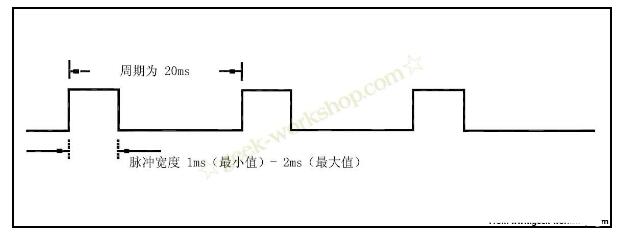
PWM(脉冲宽度调制)信号控制舵机的核心原理是通过固定周期内高电平的持续时间(脉宽)对应舵机的旋转角度,舵机内部电路根据检测到的脉宽驱动电机转动到目标位置并保持。以下
2025-09-29 10:48