反映了电机的实际位置与期望位置之间的差异。 计算DD马达偏差量的基本步骤如下: 确定期望位置:期望位置是系统希望电机达到的目标位置。这可以是用户输入的值,也可以是系统根据某种算法计算出来的值。 获取实际位置:实际位置是电机当前的实际位置。这可
2024-07-11 15:05
大家坚持下去! 1、CS 单管放大电路 共源级单管放大电路主要用于实现输入小信号的线性放大,即获得较高的电压增益。在直流分析时,根据输入的直流栅电压即可提供电路的静态工作点,而根据 MOSFET 的 I-V 特性曲线
2022-11-17 09:43
控制命令计算出来是发布给谁呢?ROS吗? 很好的问题,Control_command经过控制模块输出为车辆的控制信息之后,作为与车辆交互的指令,传递给CANBUS模块,由该模块解析为CAN协议报文
2018-07-15 09:54
在当下的芯片设计中,工艺越先进,芯片规模越大,功耗就越发敏感,降低功耗的诉求越来越紧迫。
2023-04-15 09:30
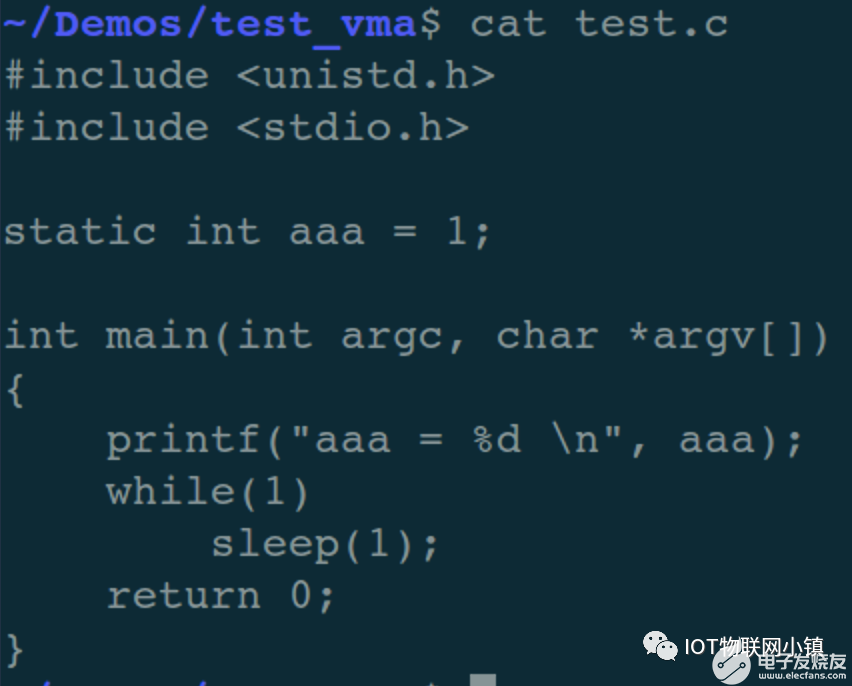
操作系统在把一个可执行程序加载到系统中时,把ELF文件中每个段的内容读取到物理内存中,然后把这个物理内存映射到该段对应的虚拟地址上(VirtAddr)。
2023-01-24 16:46
隔离开关的额定电流是指设备或元件所能承受的最大连续工作电流。它是由许多因素决定的,包括电流容量、电压容量、环境温度和使用条件等。 隔离开关是一种常见的电气设备,用于控制和切断电路中的电流。它主要
2024-02-05 15:29
在线上服务器观察线上服务运行状态的时候,绝大多数人都是喜欢先用 top 命令看看当前系统的整体 cpu 利用率。
2023-03-25 10:02
PID控制输出通常是连续的,而PWM占空比是离散的。因此,在每个PID更新周期内,需要将连续的PID输出转化为离散的PWM占空比,可以通过取整操作(如四舍五入)或舍入操作来实现。 此外,输出的PWM占空比还可以受限制于硬件限制(如PWM模块的精度和频率范围)、电源限制和控制对象的响应特性等。因此,在实际应用中,可能需要进行实验和调试,逐步微调PID参数和PWM设置,以达到较好的控制效果。
2023-11-10 17:11
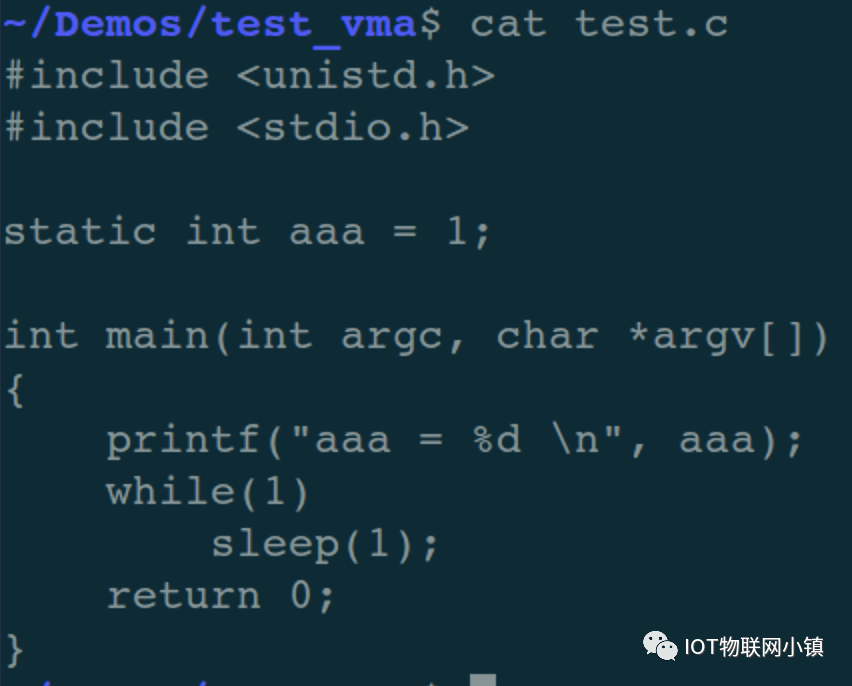
在Linux系统中,有4种类型的文件都是ELF格式,包括:目标文件,可执行文件,动态链接库文件、核心转储文件。
2022-03-29 14:36
太赫兹频段通常指的是位于光学频段和微波频段之间的电磁波频段,其频率范围一般在0.1~10 THz之间。这个频段是根据波长计算出来的。 波长是指在空间中传播一定距离后,波峰和波谷所占据的距离。在介质中
2023-09-20 14:51