
新唐的ISD1800 ChipCorder®能提供高品質、單晶片、單訊息,以及可由使用者選擇6至16秒持續時間的錄音/回播解決方
2019-11-23 11:11

新唐的ISD1800 ChipCorder®能提供高品質、單晶片、單訊息,以及可由使用者選擇6至16秒持續時間的錄音/回播解決方
2019-11-25 16:01

我们使用四英尺长的 JSC 1666 AWG 4电缆进行测试。沿电缆长度方向切开绝缘层,将34号标准规格电磁线插入绝缘层。电路中使用了 NCS333 运算放大器。由于运算放大器共模电压与其供电轨相等,因此必须具有轨到轨输入能力 (或使用更高的电源)。此外,它应该是零漂移 (斩波器) 放大器,因为标准轨到轨运算放大器在正轨附近的性能通常较差。
2018-11-30 16:49

新唐的ISD18C00 ChipCorder®能提供高品質、單晶片、單訊息,以及可由使用者選擇6至16秒持續時間的錄音/回播解決
2019-11-22 16:43
LVDS解串器的偏斜裕量是其抖动容限的指标。应用笔记3821:4通道(3个数据通道加时钟通道)LVDS串行器/解串器的偏斜裕量测量展示了一种利用串行器和LVDS互连来测
2023-01-10 09:20
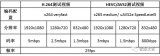
%;对于1080P视频,AVS2软解仅比H.264硬解功耗高11%。需要指出的是,软解码功耗和具体实现方案有很大相关性,随着软解码方案的不断优化,和硬解码的功耗差距还会
2018-07-26 17:06
超低功耗蓝牙空中鼠標采用了基于Freescale超低功耗高性能的Kinetis L系列32位MCU,通過控制Freescale加速計,陀螺仪和磁力計的空间运算來捕捉人体动作及位移,经過CSR BLE藍牙4.0无线传输链接將获得的数据发送到目标主机,使傳統鼠標脫離對桌面的依賴,只需輕揮手腕,即可實現懸空3D操作,隨意移動控制屏幕光標。
2015-08-17 10:06

本文主要介绍了mpu6050姿态解算原理分析及程序设计,MPU6050硬件DMP解算姿态是非常简单的,四元数法只求解四个未知量的线性微分方程组,计算量小,易于操作,是比
2017-12-11 13:51
的综合探索。研究发现,合理把握工业机器人逆解问题分析条件,对工业机器人逆解问题的旋量解法分析,为资源综合利用提供借鉴。
2019-03-29 16:28

解复位就是复位撤离,系统解复位就是复位结束了系统准备开始工作。
2023-11-28 12:20