仿人机器人的研究最早可以追溯到上世纪中期,先是模拟人的手臂功能,到后来才开始对双足机器人的研究。
2018-07-12 11:06
仿人型机器人由于具有类人的基本外形,在实际的生活中,能够代替人完成很多工作,因此对仿
2016-11-08 15:50

机器人研究是自动化领域最复杂。最具挑战性的课题,它集机械。电子。计算机。材料。传感器。控制技术等多门学科于一体,是多学科高技术成果的集中体现。而仿人步行机器
2021-04-13 13:58
为研究双足步态,弗吉尼亚理工大学机器人和机械实验室(RoMela)设计了最初的智能型动态拟人机器人(DARwIn)。在RoMela,我们在硬件上测 试了步态研究的设想和理论。我们决定用RoboCup这一国际性机器
2018-08-24 14:09
在本文中,我们将探讨我们如何利用 TensorFlow.js 构建 Shadow Art。
2019-03-15 16:21

shadow memory检测原理的实现主要就是__asan_load##size()和__asan_store##size()函数的实现。那么KASAN是如何根据访问的address以及对应的shadow memory的状态值来判断访问是否合法呢?首先看一种最简
2018-09-03 15:00
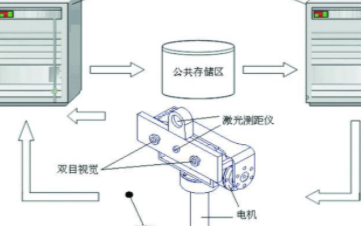
视觉是人类感知外界信息的重要手段,视觉伺服系统是机器人获取环境信息的关键组成部分。本文主要讨论仿人机器人BHR-1的视觉伺服系统。首先介绍机器人头部的视觉总体结构方案,然后论述了基于立体视觉的信息处理和头部运动控制,
2021-04-13 12:00
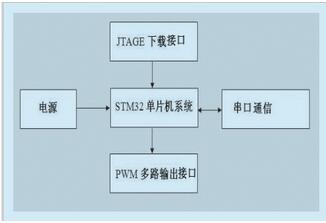
在国家863计划支持下,国防科技大学机器人实验室于2003年研制出一台新型仿人机器人;同时与合肥智能机械研究所合作,在该机器人
2020-04-06 08:22
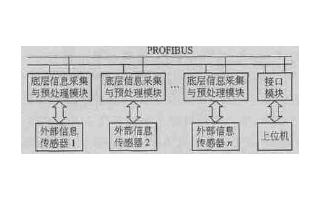
移动机器人视觉的研究主要集中在颜色模型建立、目标识别、定位以及跟踪等方面。目标的实时识别与定位是足球机器人在足球赛中精确踢球的前提。文章主要是针对目前足球机器人在视觉系统上所存在的问题进行了颜色模型建立及目标定位算法的改进,加入了目标追踪算法,确保目标识别与定位的
2016-09-19 11:18
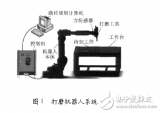
本文根据打磨机器人作业对位置和力同时控制的要求,在分析了基于位置伺服力/位混合控制策略的基础上,对基于速度伺服的力/位混合控制策略进行了
2016-09-26 17:41