步进电机的角度控制。首先要明确步进电机的细分数,然后确定步进电机转一圈所需要的总脉冲数。计算“角度百分比=设定角度/360°(即一圈)”“角度动作脉冲数=一圈总脉冲数*角度百分比。”
2021-03-16 17:04
(测量输入信号的脉冲宽度、频率,PWM 输入等),输出功能(PWM 输出、死区时间可编程的互补输出、 单脉冲模式输出等) ,容易想到使用定时器输出
2022-12-09 10:09

用户使用STM32G473RET6芯片,开发环境STM32CubeMX+Keil(LL库)。使用DMA1通道1,在半传输中断和完全传输中断里,拷贝ADC采集的数据。在应用过程中发现
2023-12-01 09:19
在前面我们提到过 DMA,这一章我们就来学习 STM32F1 的DMA 使 用。要实现的功能是:通过 K_UP 按键控制 DMA 串口 1 数据的传送,在传送过程中让
2023-06-22 10:23
昨天晚上在STM32串口DMA的问题上纠结了好长时间,所以今天上午写篇博客来谈谈我对串口DMA发送的理解。
2017-10-27 16:16
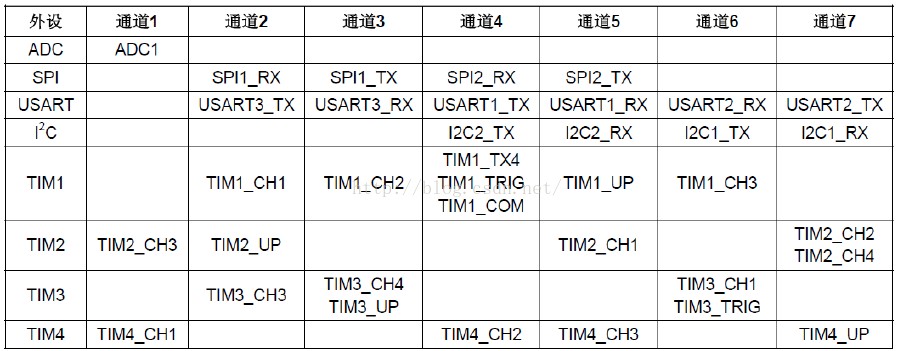
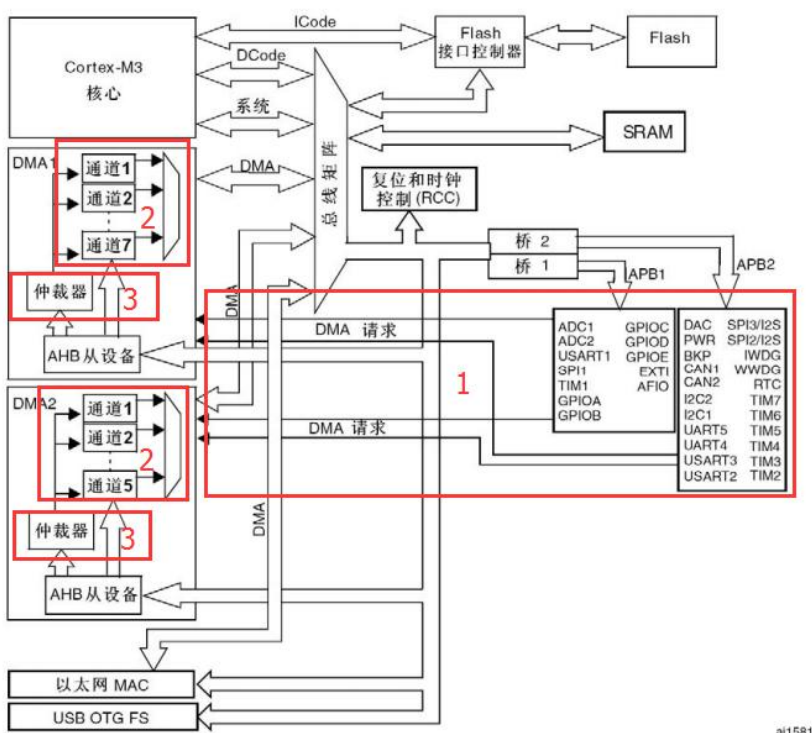
STM32有两个DMA控制器(DMA2只存在于大容量产品中),DMA1有7个通道,DMA2有5个通道,每个通道专门用来管
2018-12-19 15:40
DMA_Mode_Normal,正常模式,当一次DMA数据传输完后,停止DMA传送,对于上例而言,就是DMA_PeripheralDataSize_Byte个字节的传送
2018-06-11 08:49
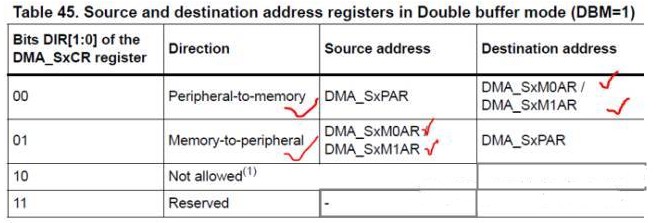
目前STM32家族中有些系列支持DMA的双缓冲模式,比如STM32F2/STM32F4/STM32F7等系列。尤其随着人
2019-02-02 16:47

