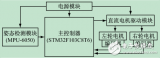
本文主要对基于STM32和MPU-6050的两轮自平衡小车系统设计与实现进行了分析,采用高性能STM32F103C8T6作为主控制器,采用卡尔曼滤波算法和双闭环PID控
2017-12-23 16:36
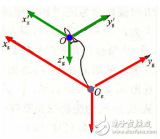
介绍了mpu6050姿态融合原理及程序代码分析,MPU6050是一款姿态传感器。主要介绍三种姿态融合算法:四元数法、一阶互补算法和卡尔曼滤波
2017-12-11 13:31

本文主要介绍了基于MPU6050的老年人跌倒监测系统设计,利用传感器MPU6050内部集成的三轴加速度、陀螺仪组件和STM32处理器结合来实现数据采集,再运用跌倒检测算法
2017-12-28 15:32
mpu6050常用作提供飞控运行时的姿态测量和计算。本文首先介绍了MPU6050姿态解算的原理,其次详细的介绍了mpu6050姿态解算程序。
2018-03-09 09:15
本文开始介绍了mpu6050的定义和mpu6050的感测范围,其次阐述了mpu6050特征,最后介绍了mpu6050与单片机的连接方法。
2018-03-09 08:42

本文为大家分享了mpu6050六轴传感器模块驱动程序源代码,STM32F1读取MPU6050的加速度和角度传感器数据的初始化步骤,以及MPU6050DMP初始化函数、D
2017-12-11 14:26

本文主要介绍了mpu6050对应i2c地址是什么,并通过stm32的硬件读取mpu6050的数据。MPU6050 的 I2C 地址是 0xD0H(11010000B)。
2017-12-11 16:04

本文为手把手教学ADC采样及各式滤波算法的教程,本教程的MCU采用STM32F103ZET6。以HAL库的ADC采样函数为基础进行教学,通过各式常见滤波的实验结果进行分析对比,搭配VOFA+工具直观的展示滤波效果。
2024-10-28 10:51
本文开始对mpu9150进行了介绍,其次介绍了mpu6050的定义、mpu6050感测范围以及mpu6050的特征,最后阐述了mpu9150和mpu6050区别。
2018-03-08 10:07

本文主要研究了HASH算法加密芯片的工作原理及其在STM32 MCU上的应用,实现了外部加密芯片对STM32 MCU的程序保护,目前的技术手段无法对其进行破解,其安全性优于其它加密方式。
2023-10-24 15:01