一个全局子程序是一个独立的机器人程序,可由另一个机器人程序调用。可根据具体要求对
2023-03-02 10:50

其中包含引用解释器的进程指针的数据. 变量包含接下来将在解释器中执行的块的数据。 根据特定的解释器,访问数据的方式如下: 读取机器人程序中的变量是指机器人在解释器中的状态。 在提交
2023-05-29 10:02
ABB机器人是一种广泛应用于工业自动化领域的智能设备,其基本程序数据是实现机器人自动化控制的基础。本文将详细介绍ABB机器人的基本
2024-06-17 09:20
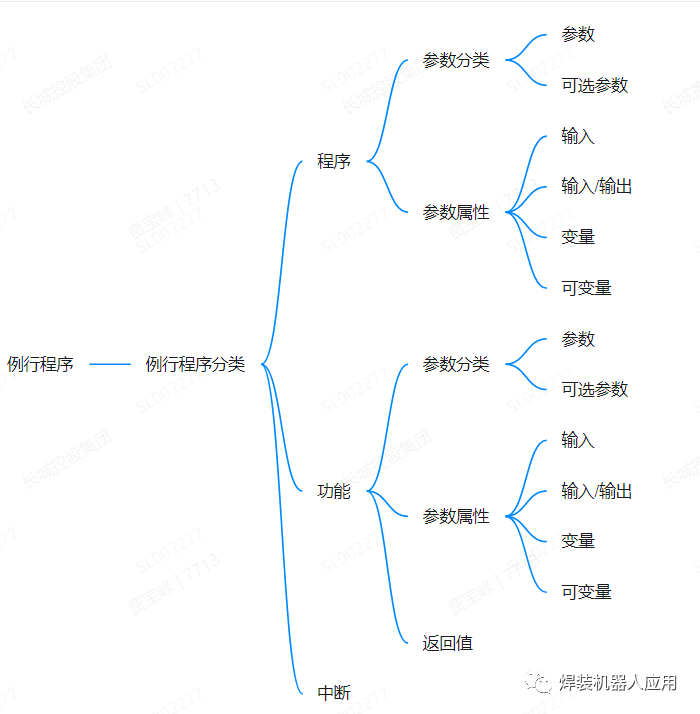
ABB机器人的例行程序可以分为三种类型;程序、功能、中断,本章主要分享一下程序和功能的用法。
2023-05-19 17:27
用KR6机器人测试这个举例程序会产生与前面例子相同的结果。机器人运动到机械零点。对于这种模式的机器人两种指令是一样的。
2023-04-18 11:24
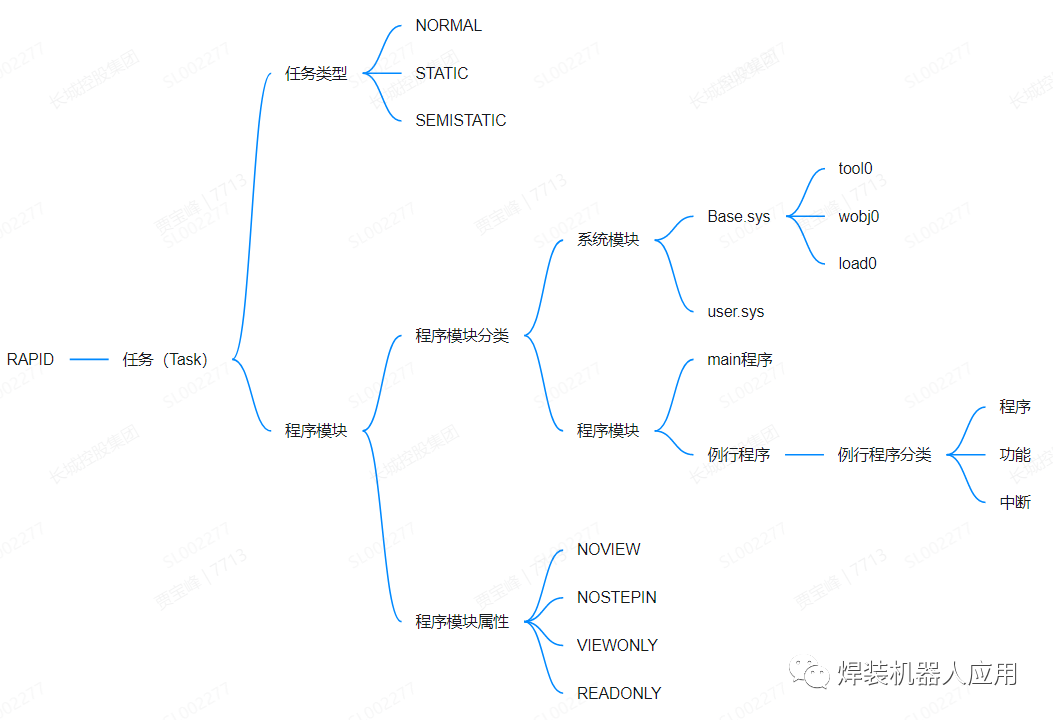
刚刚接触ABB机器人的同学,可能对程序内的任务、模块、例行程序等概念不是特别了解,这里简单总结了一下ABB机器人程序结构
2023-05-25 16:15
机器人程序在运行过程中,可能会因为人为操作或报警的原因而发生程序中断。本文就机器人程序中断与相应的恢复方式进行简单介绍。
2022-03-21 10:11

PP TO MAIN 程序是用来使机器人里的程序回到 MAIN 主程序的。
2025-07-04 15:34
检查程序号是否大于0 ,- 机器人状态是否在轨迹上,-SPS指令是否在执行-是否在外部自动;%{SE}%MKUKATPVW,%C,%V
2022-09-13 16:07
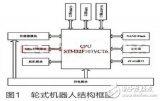
为解决当前大部分家庭服务机器人不具备行走功能或只具有简单的避障能力等问题,本文设计一种基于STM32的家庭服务机器人系统。整个系统由轮式机器人、XBee协调器、RFID
2018-04-06 08:26