双目摄像头标定是测距及其三维建模非常重要的步骤,因为标定出来的内外参数将会用来对原始图像进行反畸变校正,而反畸变的效果对立体匹...
2020-12-08 22:27
这几天把基于opencv C++ api将鱼眼镜头的双目标定以及测距功能实现完毕,效果还可以,至少对齐得非常棒。 这里把其流程及其关键函数在这...
2020-12-08 22:11

双目测距的原理就说到这里,为了避免大家看到大段纯叙述性的文字头晕,下面的行文将会以FAQ的形式围绕着实现双摄像头测距过程中碰到的几点疑惑展开。
2023-04-26 16:47
深度信息恢复是计算机视觉领域的一个重要研究内容。使用传统的光学成像系统对不同距离的物体成像时,需要机械移动会造成图像放大率变化,导致深度测量产生误差。近年来,电控调焦的液晶透镜光学成像系统已实现对焦、变焦、深度测量等功能,利用液晶透镜光学成像系统进行
2022-06-14 13:43

0 引言 双目立体视觉测量是基于视差原理,由多幅图像获取物体三维几何信息的方法。在计算机视觉系统中,双目立体视觉测量一般由
2010-09-26 17:07

本实例背景较为简单,只能适用于固定场合的零件检测,水果品质检测等。基本的几何知识是必要的,例如求直线的交点,一元函数的线性回归。
2023-07-19 12:43
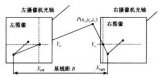
双目立体视觉是基于视差,由三角法原理进行三维信息的获取,即由两个摄像机的图像平面和北侧物体之间构成一个三角形。一直两个摄像机之间的位置关系,便可以获得两摄像机公共视场内物体的三维尺寸及空间物体特征点的三维坐标。所以,双目视觉系统一般由两个摄像机构成。
2018-04-11 14:32

双目更多的是基于物理测量,而单目视觉则是基于逻辑推理,通过大量的数据训练,先识别出目标,再根据目标的大小和高度估算距离。因此,单目视觉的漏检率高于双目立体视觉,因为客观上存在corner case。
2023-08-17 09:40
在这里我们所说的双目标定是狭义的,讲解理论的时候仅指两台相机之间相互位置的标定,在代码实践的时候,我们才说完整的双目标定。
2021-07-04 11:04
在Apollo生态系统的大家庭里,在物流、工程等作业场景也得到了创新应用。会上,李彦宏还宣布了另一个量产“惊喜”——搭载中科慧眼双目双焦相机的新石器无人作业车也已量产下线了。
2018-09-04 17:30