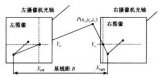
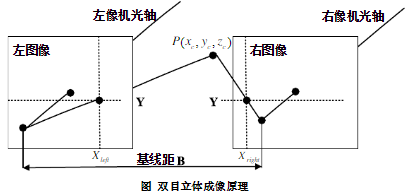
双目立体视觉是基于视差,由三角法原理进行三维信息的获取,即由两个摄像机的图像平面和北侧物体之间构成一个三角形。一直两个摄像机之间的位置关系,便可以获得两摄像机公共视场内物体的三维尺寸及空间物体特征点的三维坐标。所以,双目视觉系统一般由两个摄像机构成。
2018-04-11 14:32
双目立体测量的特点类似于“双目导航、定位”,一般来说:第一、需要提取的点不多,仅把被测物需要测量部分的点找到即可;第二、速度要求较高,一般要求一秒中
2018-01-23 11:32
相比于单目视觉,双目视觉(Stereo Vision)的关键区别在于可以利用双摄像头从不同角度对同一目标成像,从而获取视差信息,推算目标距离。
2016-11-05 03:46
在深度相机的主流技术方案Structure Light,ToF,Stereo Dual)中,主动双目成像方案可以基于低成本的硬件,获得高分辨率、高精度的深度图像,但是立体匹配算法(stereo
2023-07-04 11:33
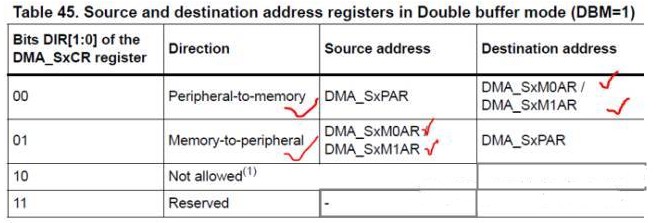
目前STM32家族中有些系列支持DMA的双缓冲模式,比如STM32F2/STM32F4/STM32F7等系列。尤其随着人
2019-02-02 16:47
审核编辑:彭静
2022-10-31 16:28

物体的形状限制,经过处理的虚拟数据具有广泛的应用价值。本次设计课题为双目三维光学测量硬件系统设计。本文以格雷码结构光三维测量为编码原理,用SolidWorks建立三维模型,MeshLab处理点云数据图像
2023-06-02 17:00
最近来看看一些双目稠密匹配的算法。说来惭愧,SGM在航测领域是很重要的算法(当然也是最好的双目稠密匹配算法之一),自己却没有认真读过,只是大致有些了解。
2022-12-15 15:12
双目标定和普通相机的标定一样,其标定时不仅标定出两个相机的内参,还要标定出两个相机之间的关系。因此,在进行双目标定时,需要使两个相机对同一标定板进行多次取图,分别标定出各自的内参和相对于标定板的外参,然后便可计算出两相机位置间的关系:
2022-10-10 17:25

本文详细介绍了使用STM32测量频率和占空比的几种方法。
2018-03-13 15:43