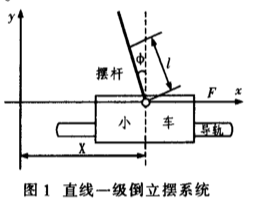
倒立摆控制系统(InvertedPendulumSystem简称IPS)是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。对倒立摆
2017-11-27 16:36
建立直线一级倒立摆的仿真模型如图3所示。“GLlIPState—Space”为直线一级倒立摆的状态空间模型。双击图3中的“Poles Control”模块,打开图4中的
2020-05-03 18:11

倒立摆系统在控制理论研究中是一种较为理想的实验装置。倒立摆系统可以用多种理论和方法来实现其稳定控制,如PID、自适应、状态反馈、智能控制、模糊控制及人工神经元网络等多种
2020-05-03 10:29
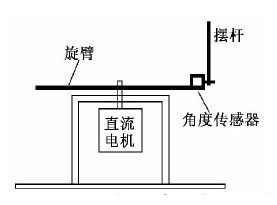
系统工作原理如下:摆杆摆动时,角度传感器检测摆杆的角度,根据角度传感器的输出特性,其输出电压经A/D转换器转换成电压数字量,该数字量与期望的值进行比较产生偏差,通过单片机对该偏差进行处理,即PID控制运算,根据运算结果产生控制信号控制电机和旋臂的转动,使
2019-01-16 15:31
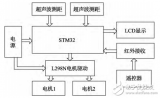
本文主要介绍了一种基于STM32的可遥控智能跟随小车的设计与实现,采用了超声波测距、电机驱动、红外遥控等功能模块设计。STM32连接了LCD显示模块和红外接收电路,分别用于显示运动、状态信息和接收遥控器的控制信号。
2017-12-23 14:47

学习一种单片机最快的方式莫过于用它实际制作一个作品了,前些天看到有人在玩平衡小车,感觉非常有趣,于是就决定自己动手制作一个基于stm32的两轮平衡小车。从电路板设计,到程序编写,一步一步的,希望自己在这个过程中有一定
2023-07-25 15:48
风力摆系统是一种利用风力作为动力对物体进行位置控制的摆动装置控制系统。 在我国虽然目前还没有系统的成品的销售与应用,但这种控制理论已经应用于方方面面。目前的普遍问题是风力摆系统的自动控制水平不高
2017-11-27 09:18

本文主要介绍了一种基于STM32单片机的视频遥控小车的设计,采用STM32单片机作为主制器,通过一款Wifi射频模块RT5350实现远程视频画面的传输,整个项目涵盖的知识面广,包括单片机编程技术,OpenWrt路由器
2017-12-25 14:52
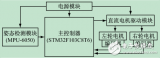
本文主要对基于STM32和MPU-6050的两轮自平衡小车系统设计与实现进行了分析,采用高性能STM32F103C8T6作为主控制器,采用卡尔曼滤波算法和双闭环PID控制算法对
2017-12-23 16:36

压摆率是什么?压摆率是衡量运放输出端电压变化“速度极限”的关键指标。如果输入信号要求的变化速度超过了这个极限,输出波形就会失真变形。以下是LM358DT的数据手册上的一个图,通过这个图了解一下压摆率
2025-08-07 13:04 广州德肯电子股份有限公司 企业号