本文首先介绍了舵机工作原理,其次阐述了舵机控制原理及舵机的追随特性,最后介绍了舵机的
2018-05-30 11:13
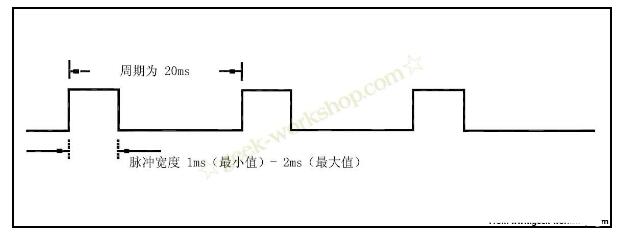
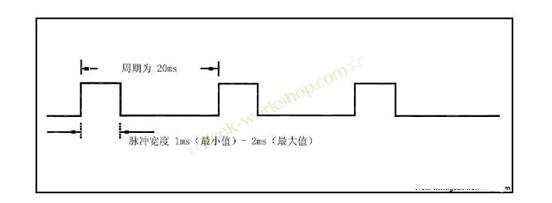
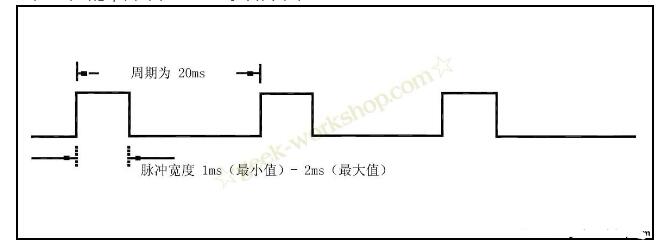
本文首先介绍了舵机的工作原理,其次介绍了舵机的控制方法,最后阐述了舵机的速度控制。
2018-05-11 15:51
S7-200 SMART CPU 可以通过以太网电缆与安装有STEP7 Micro/WIN SMART 的编程设备进行通信连接。
2023-03-29 09:31
”,可以帮助用户方便地调试、操作和监视S7-200 SMART 的工作状态,验证控制系统接线是否正确,调整配置运动控制参
2022-12-14 09:27
数字舵机(Digital Servo)和模拟舵机(Analog Servo)在基本的机械结构方面是完全一样的,主要由马达、减速齿轮、控制电路等组成,而数字舵机和模拟
2018-05-30 16:29
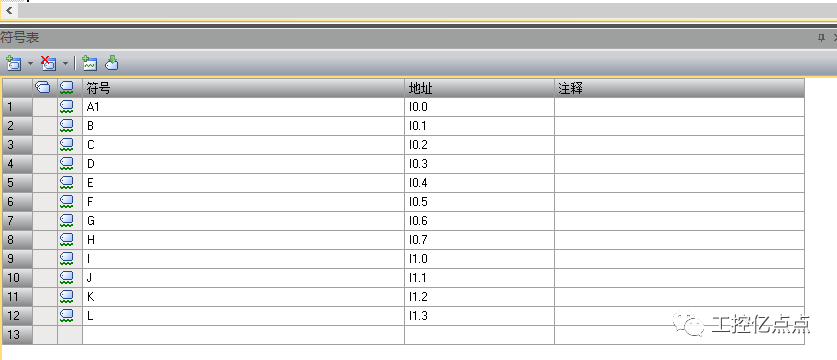
导入S7-200 Smart变量
2023-02-07 10:03

从 S7-200 SMART V2.5 版本开始,S7-200 SMART 开始支持做 PROFINET IO 通信的智能设备。作为智能设备,S7-
2023-07-02 14:21
本文首先介绍了舵机的控制方法,其次阐述了Arduino控制舵机的两种方法,最后详细阐述了arduino控制
2018-05-11 14:28

S7-200 SMART 断电重启后由于初始化指令的执行,当前位置会复位为0。要使S7-200 SMART运动控制的当前
2024-01-10 10:28
这些库文件的添加需要找到相应功能的库,例如我们要添加模拟量的SCale转换库。首先我们要找到这个的库文件:(注意其后缀名)
2022-09-29 16:20