本文提出了一个鲁棒且快速的多模态语义 SLAM 框架,旨在解决复杂和动态环境中的 SLAM 问题。具体来说,将仅几何聚类和视觉语义信息相结合,以减少由于小尺度对象、遮挡和运动模糊导致的分割误差的影响。
2022-08-31 09:39

近年来,SLAM技术取得了惊人的发展,领先一步的激光SLAM已成熟的应用于各大场景中,视觉SLAM虽在落地应用上不及激光SLAM,但也是目前研究的一大热点,今天我们就来
2023-09-05 09:31

SLAM至今已历经三十多年的研究,这里给出经典视觉SLAM框架,这个框架本身及其包含的算法已经基本定型,并且已经在许多视觉程序库和机器人程序库中提供。
2023-08-10 14:15

其中,SLAM算法插件提供了SLAM领域流行的优秀算法,包括DSO,ORBSLAM,SVO和TheiaSFM等,这些插件可以直接集成到自己的代码中,研究人员也可以基于这些插件进行进一步研究或者贡献自己的插件。此外Rviz也被集成到了这一
2019-03-07 09:42
SLAM 是 Simultaneous Localization and Mapping 的缩写,中文译作“同时定位与地图构建”。它是指搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型,同时估计自己的运动。如果这里的传感器主要为相机,那就称为“视觉
2022-12-05 10:16
能力也过硬,一般企业年薪至少30W起步了。 学习SLAM主要需要攻克三大难关: 扎实的数学基础 对整个SLAM大框架及细节部分理解到一定深度 比较高度的编程能力 这三点都绝非易事,需要花很大的功夫,中间也有不少弯路要
2023-06-29 15:28
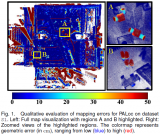
在SLAM中评估大规模的点云地图仍颇具挑战,主要原因在于缺乏统一、稳健且高效的评估框架。本文提出了MapEval,这是一个用于点云地图综合评估的开源框架。在模拟数据集和真实世界数据集上开展的大量实验
2024-12-13 11:18
(Visual SLAM,VSLAM)是将图像作为主要环境感知信息源的SLAM系统,VSLAM以计算相机位姿为主要目标,通过多视几何方法构建3D地图[4]
2022-12-02 15:00

同时定位与地图构建(SLAM)是一项关键技术,允许移动机器人在部分或完全未知的环境中自主导航。它包括使用机载传感器同时估计机器人状态和构建传感器检测到的环境地图。SLAM可以根据传感器和地图构建技术
2024-11-12 11:26
