本文开始介绍了mpu6050的定义和mpu6050的感测范围,其次阐述了mpu6050特征,最后介绍了mpu6050与单片机的连接方法。
2018-03-09 08:42
mpu6050常用作提供飞控运行时的姿态测量和计算。本文首先介绍了MPU6050姿态解算的原理,其次详细的介绍了mpu6050姿态解算程序。
2018-03-09 09:15
本文开始对mpu9150进行了介绍,其次介绍了mpu6050的定义、mpu6050感测范围以及mpu6050的特征,最后阐述了m
2018-03-08 10:07
本文介绍了mpu6050和mpu3050有什么不同和相同。分别介绍了mpu6050和mpu3050基础以及特点,mpu3
2017-12-11 15:41
本文开始介绍了mpu6500的定义与MPU6500驱动总结,其次阐述了mpu6050的定义与mpu6050感测范围,最后介绍了m
2018-03-08 09:54
mpu6500和mpu6000各有优势。MPU6500和MPU6000是由英飞凌(InvenSense)公司开发的两种九轴惯性测量单元(IMU),它们集成了三轴加速度计
2023-12-27 17:52
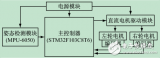
本文主要对基于STM32和MPU-6050的两轮自平衡小车系统设计与实现进行了分析,采用高性能STM32F103C8T6作为主控制器,采用卡尔曼滤波算法和双闭环PID控制算法对小车进行自平衡控制。提高了数据采集和控制的实时性,提高了系统的稳定性和抗干扰能力。
2017-12-23 16:36
MPU6050和MPU6500都是InvenSense公司生产的高性能六轴陀螺仪和加速度计传感器。它们被广泛应用于各种领域,如移动设备、虚拟现实、机器人、汽车等。虽然它们之间有一些区别,但是无法简单
2023-12-21 16:54

本文开始阐述了卡尔曼滤波的概念,其次阐述了卡尔曼滤波的性质与卡尔曼滤波的应用,最后介绍了mpu6050卡尔曼滤波分析及mpu6050卡尔曼滤波输出姿态角程序。
2018-03-09 08:57

本文为大家分享了mpu6050六轴传感器模块驱动程序源代码,STM32F1读取MPU6050的加速度和角度传感器数据的初始化步骤,以及
2017-12-11 14:26