三维重建的一种重要方法,具有成本低、精度高等优点,因此越来越受到人们的关注和青睐。本文就基于光学成像的物体三维重建技术进行研究和探讨。
2023-09-15 09:29
对于新手来说,使用格雷码做单目结构光三维重建是一个入门级的训练。但是在复现时往往会遇到一个问题,明明解码都很不错了,重建后的点云精度却很低,甚至重建出来的平面点云出现断层现象。
2023-01-13 11:41

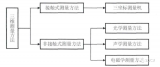
接下来进入主题,正式介绍结构光编码方案。结构光三维重建按照所投影的图案一般可以分为以下三类,点结构光、线结构光和面结构光,其中面结构光按照编码原理又可以基于时域编码的结构光和基于空域编码的结构光。
2023-08-16 16:52
扫描。三维匹配的目的就是把相邻扫描的点云数据拼接在一起。三维匹配重点关注匹配算法,常用的算法有最近点迭代算法 ICP和各
2023-06-19 11:06
在多重继承中,需要解决的主要问题是标识符不唯一,即二义性问题。
2018-03-14 15:26

在机器视觉和机器人领域的许多前沿应用中,学习准确且高效的三维形状表达是十分重要的。然而,现有的基于三维坐标的隐式表达在表示三维形状或是渲染二维图像时,需要耗费昂贵的计算
2023-11-17 16:23
这些方法在近年来取得了令人瞩目的效果,在通用物体重建和类似人脸的特殊物体重建上都取得了不错的结果。接下来我们将从重建问题的流程,三维表示,基于不同表示的
2019-08-02 15:04

航空建筑深度估计是三维数字城市重建中的一项重要任务,基于深度学习的多视图立体(MVS)方法在该领域取得了较好的成果。目前的主要方法通过修改MVS 框架实现建筑物的深度估计,缺乏对建筑物内在结构的考虑,易导致精度不足等问题。
2024-11-07 10:16
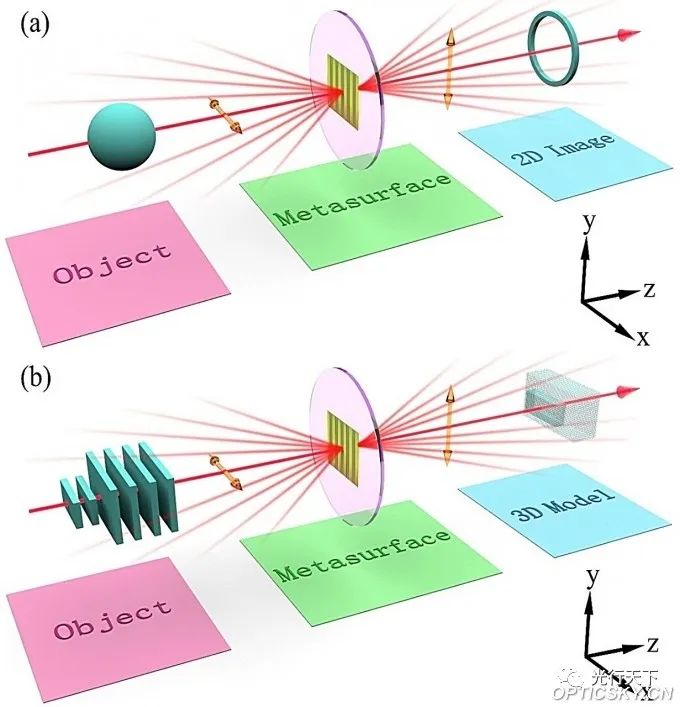
随着物体识别和三维(3D) 重建技术在各种逆向工程、人工智能、医疗诊断和工业生产领域变得必不可少,人们越来越关注与寻求可以简化处理的高效、更快的速度和更集成的方法。
2023-12-22 10:13
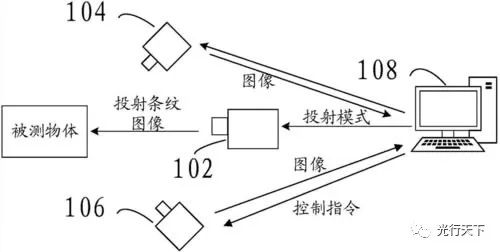
该方法具体通过六个步骤实现:图像的采集、系统相机标定、特征模板匹配、图像处理、三维仿真匹配以及三维重建。首先,通过两个相机于不同位置对待测物体进行图像信息感知获取。然后根据三角测量原理获得待测表面的
2023-09-01 16:12