在电机驱动领域,L293D双路全桥驱动电路因其高效、稳定和易用的特点而广受好评。本文将详细介绍L293D的工作原理、内部结构、应用场景以及为何它是实现电机准确控制的理想选择。 一、内部结构解析
2024-05-20 17:04
在电子技术的飞速发展中,驱动IC作为连接控制单元和执行机构的关键桥梁,其性能优劣直接影响到汽车的运行效率和驾驶体验。L293D新型双路全桥式驱动IC,以其独特的设计和功能,正逐渐成为行业内的优选方案
2024-05-07 18:25
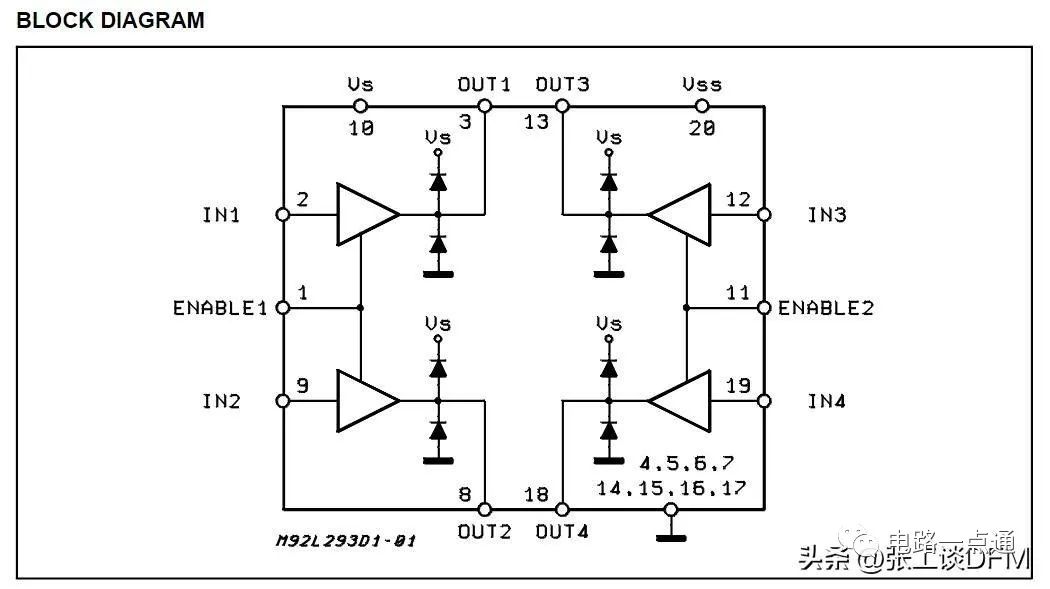
。 L293D驱动器模块的原理是利用H桥电路来控制电机的正反转和速度调节。H桥是一个四象限输出功率放大器,因其电路形状像字母H而得名。在H桥电路中,四个开关分别位于四个象限中,通过控制这四个开关的状态,可以实现电机的正反转和速度调节。 L293D电机驱动
2024-02-02 14:53
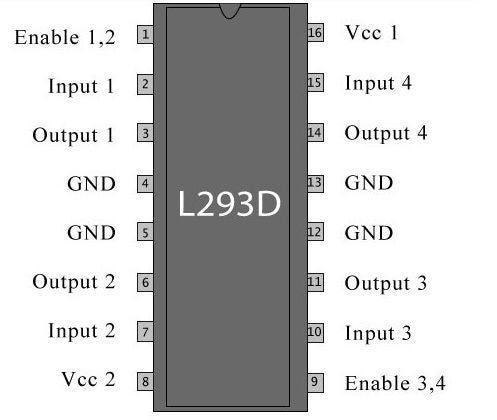
电机控制器驱动器IC广泛用于电子电路中,以轻松控制电机并有效地驱动电机。L293D是类似的电机驱动器,主要与Mirco控制器一起使用来执行电机动作。该IC能够在任一方向上同时驱动两个电机,甚至可以在
2023-07-02 14:23
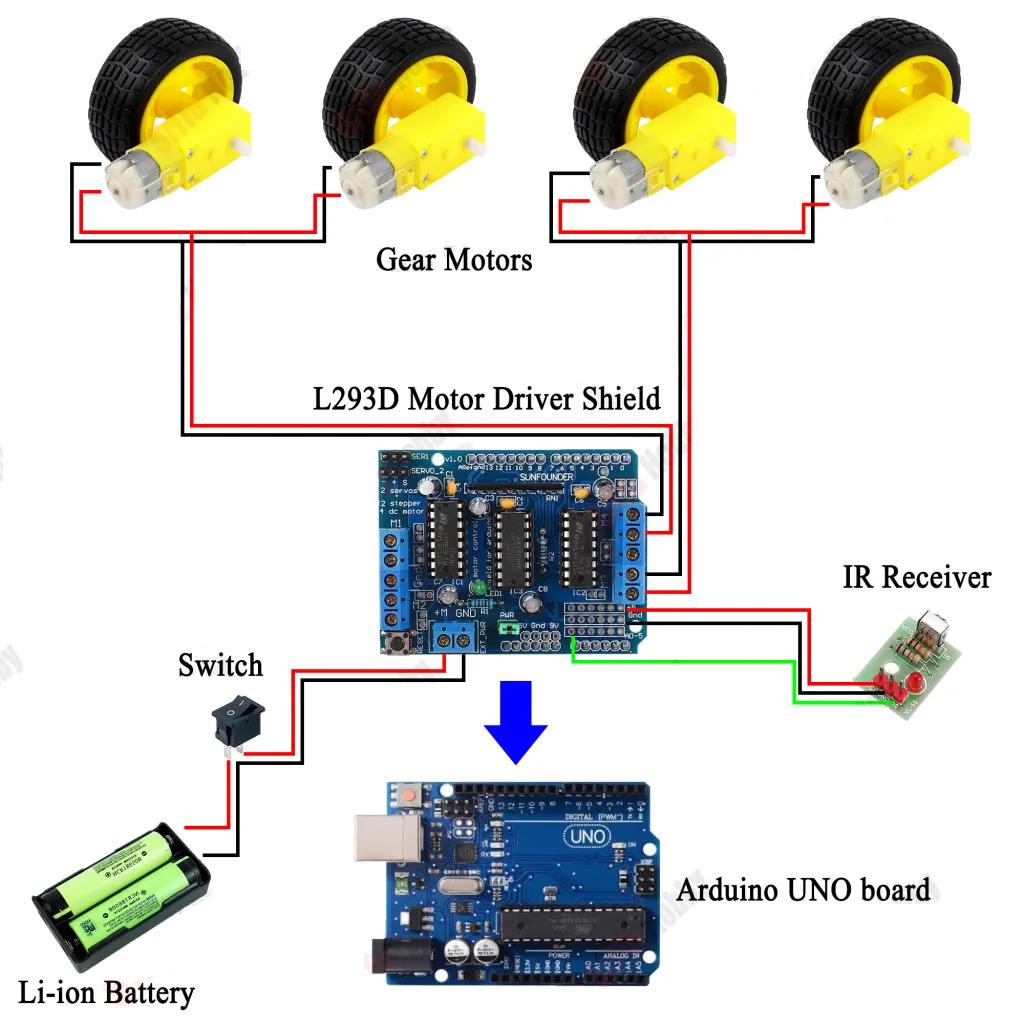
本项目使用Arduino UNO开发板和L293D马达驱动器,制作了一个可由任何IR控制器进行控制的遥控车。
2022-06-24 09:32
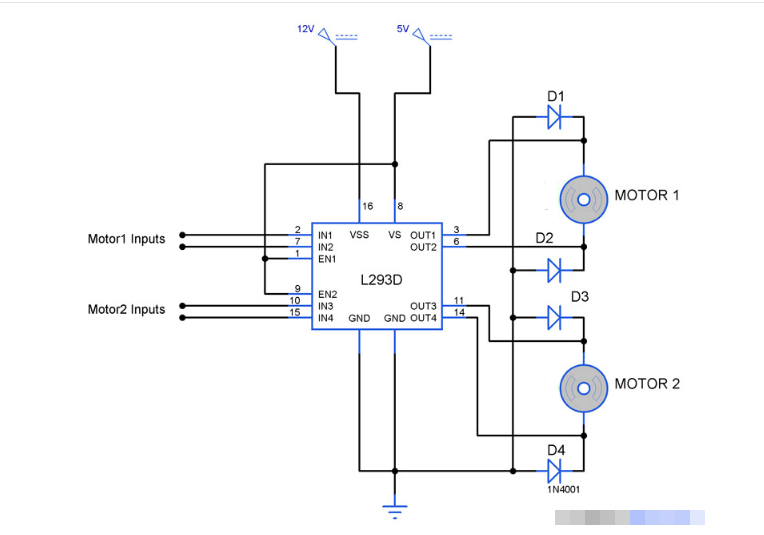
L293D具有两个+ Vpin(8和16)。 ‘+ Vmotor(8)引脚为电机供电,而+ V(16)则为芯片逻辑供电。我们已经将它们都连接到Arduino 5V引脚。但是,如果您使用的是功率更高
2019-12-02 10:41

雙極電晶體模型及電路 零件電晶體 2N3904 一枚;電阻 4.7M、1M、470k、100k、47k、4.7k、3.
2008-10-10 11:50
现在,取决于输入和启用的值,电动机将以全速(当启用为HIGH时)或以较低的速度(当启用为Enable时)沿顺时针或逆时针方向旋转。让我们假设当启用使能为HIGH且输入1和输入2分别为HIGH和LOW时左马达,则马达将沿顺时针方向移动。
2019-11-22 16:07
驱动电动机需要高电流。另外,旋转方向和速度是两个需要控制的重要参数。这些要求可以通过使用微控制器(或像Arduino这样的开发板)来处理。但有个问题;微控制器无法提供足够的电流来运行电机,如果直接将电机连接到微控制器,可能会损坏微控制器。例如,Arduino UNO引脚限制为40mA电流,远小于控制小型电机所需的100-200mA电流。要解决这个问题,我们应该使用电机驱动器。电机驱动器可以连接到微控制器以接收命令并以高电流运行电机。
2019-08-05 11:26
第一个参数是移动所需的步长,第二个参数是确定方向(前进或后退),第三个参数确定步长类型:单(激活一个线圈),双(激活两个线圈以获得更大的扭矩) ,INTERLEAVED(线圈的数量从一到两个连续变化,反之亦然,直到双精度),但是,在这种情况下,速度减半)和MICROSTEP(缓慢改变步骤以提高精度)。在这种情况下,扭矩较低。)默认情况下,当电动机停止移动时,电动机将保持其状态。
2019-10-12 09:24