电子发烧友
7037次浏览
LINUX下的CAN驱动:/* * Microchip MCP2515 CAN controller driver. * * Copyright (C
2009-08-23 11:56
分析了Windows CE.NET下基于单接收缓冲队列的CAN驱动模型在响应性能方面所存在的不足,提出基于双接收缓冲队列的CAN驱动模型设计。本文的应用背景是基于
2009-08-07 10:00

DEF_DEBUG_WARNING#define DEF_DEBUG_ERROR#include "debug.h"#include "uart.h"#include "stm32f10x_rcc.h"#include "stm32f10x_can
2021-12-04 17:36
使用env 配置CAN总结,实现CAN测试,并顺利完成收发数据,用CAN分析仪展示。
2023-04-21 15:24
CAN驱动就是底层协议 原理都一样CAN协议是每家主机厂定义,可以不同是不是这样理解,请教下 谢谢
2020-03-27 16:10
最近从LINUX中拆出来一个CAN驱动,结果是不断总线错误(stuff error和Form error)下面说具体情况: 使用的是zynq7000,CAN1。与其对测的板子是335xs。已经确认
2016-05-26 21:33
WINCE 是一个高效率的实时操作系统,拥有多线程、多任务、确定的实时性和完全抢占式优先级的环境。本文以WINDOWS CE 为基础,提出了基于嵌入式系统的CAN 的核心原理和概念, 完
2009-08-18 10:58
最近新拿到一块板子,MCU是飞思卡尔的MC9S12XHY128芯片,CAN驱动芯片用的是TJA1055,小弟没接触过容错CAN这块,如此高大上的东西只能请教专业的各位大大了,还请各位大大不吝赐教!!!附上容错
2015-06-23 15:23
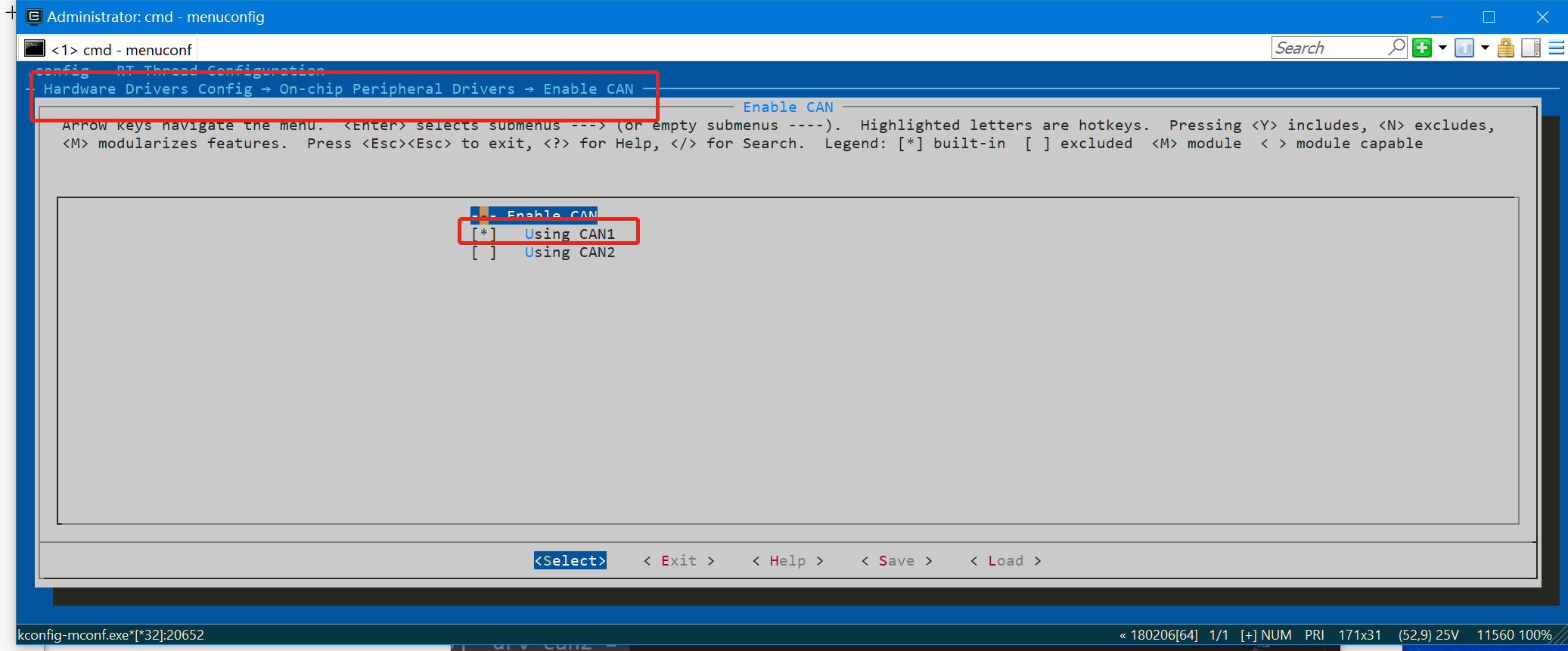
的测试就使用RT-studio,包下载,工程创建,都很顺利。模板工程没有打开CAN驱动,需要打开配置中的CAN驱动,如下图所示打开此处之后编译还是正常的,但查看代码后发
2022-07-01 10:57
在beaglebone中开发CAN驱动,我采用内核默认的配置,参考文档是“Sitara Linux Software Developer’s Guide”,内核用
2018-05-15 00:19