物料搬运机械手由机械手和物料分拣两部分装置组成。如图1所示,机械手主要由机座(采用步进电机驱动旋转)、水平手臂(采用直线坐标气缸HMP-20-200)、垂直手臂(采用滑块气缸SLT-16-50)、气
2020-05-17 10:10
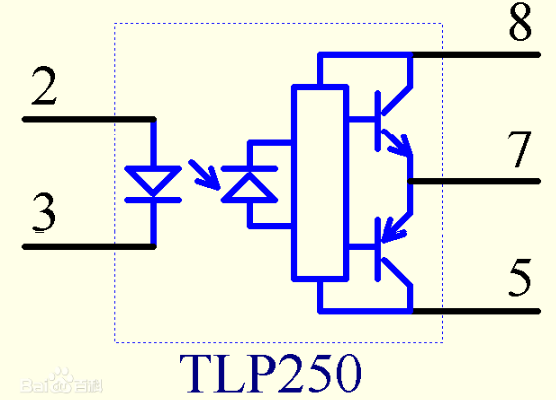
本文主要介绍了tlp250工作原理(tlp250引脚图及功能_内部结构_封装尺寸及应用电路),TLP250包含一个GaAlAs光发射二极管和一个集成光探测器,8脚双列封装结构。适合于IGBT或电力MOSFET栅极驱动
2018-01-29 11:03
首先讲一下在工业应用中,手和眼(摄像机)的两种位置关系,第一种是将摄像机(眼)固定在机械手(手)上面,眼随手移动;第二种是摄像机(眼)和机械手(
2019-05-07 16:18
