这几天把基于opencv C++ api将鱼眼镜头的双目标定以及测距功能实现完毕,效果还可以,至少对齐得非常棒。 这里把其流程及其关键函数在这...
2020-12-08 22:11
双目摄像头标定是测距及其三维建模非常重要的步骤,因为标定出来的内外参数将会用来对原始图像进行反畸变校正,而反畸变的效果对立体匹...
2020-12-08 22:27

双目测距的原理就说到这里,为了避免大家看到大段纯叙述性的文字头晕,下面的行文将会以FAQ的形式围绕着实现双摄像头测距过程中碰到的几点疑惑展开。
2023-04-26 16:47

本实例背景较为简单,只能适用于固定场合的零件检测,水果品质检测等。基本的几何知识是必要的,例如求直线的交点,一元函数的线性回归。
2023-07-19 12:43
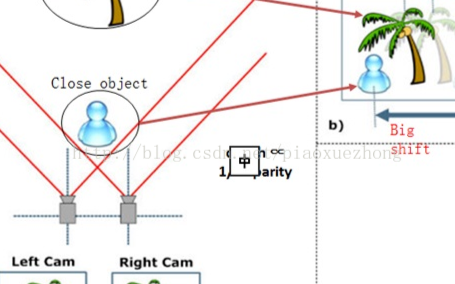
简单来说,基于双目立体视觉的测距类似人类的双眼,和基于TOF、结构光原理的测距不同,它不对外主动投射光源,完全依靠拍摄的两张图片( RGB 或者灰度图)来计算距离。
2022-11-18 14:21
上图中的人和椰子树,人在前,椰子树在后,最下方是双目相机中的成像。其中,右侧相机成像中人在树的左侧,左侧相机成像中人在树的右侧,这是因为双目的角度不一样。
2022-09-26 09:37
先说一下单/双目的测距原理区别: 单目测距原理: 先通过图像匹配进行目标识别(各种车型、行人、物体等),再通过目标在图像中
2020-11-05 10:07
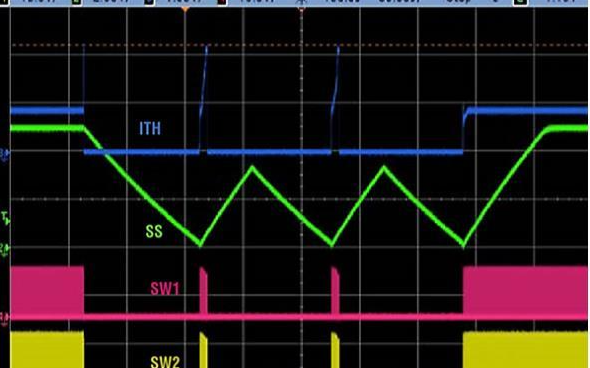
高性能通信、服务器和计算系统中的ASIC、FPGA和处理器需要使用能直接从12 V或中间总线生成1.0 V(或更低)电压的核心电源——最大负载电流有时候可能高于200 A。这些电源必须满足严格的效率
2021-01-15 14:06

利用双摄像头进行测距的时候世界坐标的原点究竟在哪里? A:世界坐标系的原点是左摄像头凸透镜的光心。
2023-06-02 12:50
在window上安装pytorch虽然比caffe容易得多,但是也遇到了各种各样得坑,这里我把自己遇到的坑记录分享一下。
2020-12-14 20:22