
传感器未对准通常是在其反馈回路中使用MEMS惯性测量单元(IMU)的高性能运动控制系统的关键考虑因素。对于IMU中的陀螺仪,传感器未对准描述了每个陀螺仪的旋转轴与系统定义的惯性参考系(也称为全局系)之间的角度差。
2023-01-08 20:05

对于在反馈环路中采用MEMS惯性测量单元(IMU)的高性能运动控制系统,传感器对准误差常常是其关键考虑之一。
2016-11-05 03:56

对于复杂且高动态惯性配置的MEMS IMU应用,评估功能时需要考虑许多属性。在设计周期早期评估这些属性优于追逐开放性成果,从而实现“尽可能精确”。
2018-07-11 10:33
惯性测量单元Inertial measurement unit,简称IMU,是测量物体三轴姿态角(或角速率)及加速度的装置。陀螺仪和加速度计,是惯性导航系统的核心装置。借助内置的加速度传感器和陀螺仪,IMU可测量来自三个方向的线性加速度和旋转角速率,通过解算可获得
2019-10-04 17:12
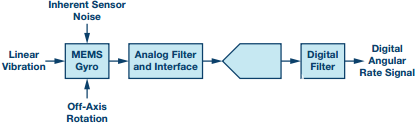
当MEMS惯性测量单元(IMU)在运动控制系统中作为反馈传感器运行时,陀螺仪噪声是一种需要了解的重要行为,因为它可能导致其所监控的平台上出现不良的物理运动。根据条件的不同,在为特定MEMS
2023-01-08 14:59
本文将首先简要介绍 IMU 的用途,接着介绍 STMicroelectronics 的 LSM6DSO。然后,借此器件阐释在 IMU 中添加和集成机器学习与决策树处理功能后,为何能为主机应用处理器分担实时位置和运动处理,以及如何在实际应用中使用这些功能。
2019-06-29 09:39
/sec),体积小于1立方英寸。ADIS16355是在整个温度范围内校准,具有卓越的偏压温度稳定性(0.005 deg/sec/°)。
2018-04-14 11:36

在阅读论文 《A Robust and Easy to Implement Method for IMU Calibration without External Equipments》的时候了解到
2023-05-24 17:28

我们经常会看到DOF,自由度的概念, 今天我们就从DOF开始进一步理解IMU的基础知识和应用场景。
2019-06-01 11:07

MEMS器件目前主要应用于汽车和消费电子,未来在医疗、工业、航空航天市场也将逐渐普及。那么MEMS是什么?有什么特点?MEMS设计与制造面临哪些困难?本文将会一一解答。
2016-11-01 10:46