本文主要介绍了mpu6050对应i2c地址是什么,并通过stm32的硬件读取mpu6050的数据。MPU6050 的 I2C 地址是 0xD0H(11010000
2017-12-11 16:04
mpu6050常用作提供飞控运行时的姿态测量和计算。本文首先介绍了MPU6050姿态解算的原理,其次详细的介绍了mpu6050姿态解算程序。
2018-03-09 09:15
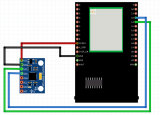
本文开始介绍了mpu6050的定义和mpu6050的感测范围,其次阐述了mpu6050特征,最后介绍了mpu6050与单片机的连接方法。
2018-03-09 08:42

控制器由系统板和接口板组成:系统板是由LPC2214 和S3C44B0X 及其相关外围电路构成的,是控制器的核心;接口电路板主要负责系统板和机床电器之间的驱动,电平匹配。系统的硬件结构参考图1。
2020-12-20 12:24
本示例将演示使用 DMP6 从 MPU6050 获取数据。MPU6050 配备了数字运动处理器 (DMP),用于处理运动算法的计算,如转换为三轴偏航/俯仰/滚动平面、转换为四元数或转换为欧拉角。
2025-06-19 14:20
#include __CONFIG(0x3B31); unsignedcharnum=0,i=0; voidinit() { TRISB=0x
2019-01-16 15:32
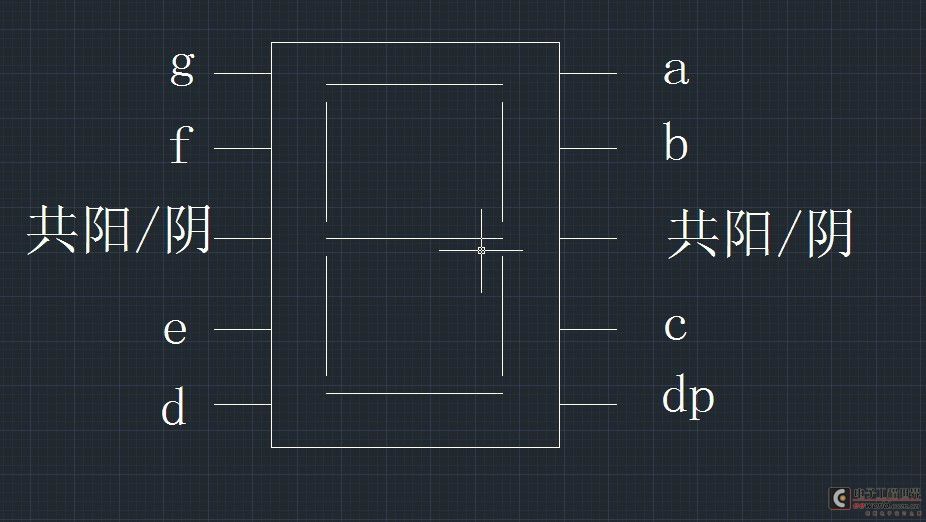
8E} 共阴极数组0~9:display[]={0x3F,0x06,0x5B,0x4F,0x6E,
2019-02-11 10:00

从RAM地址0x0200开始读取一个长度为8的字符数组,并烧写至地址为0x1800的Flash中。
2018-05-10 14:02
本文开始对mpu9150进行了介绍,其次介绍了mpu6050的定义、mpu6050感测范围以及mpu6050的特征,最后阐述了mpu9150和mpu6050区别。
2018-03-08 10:07