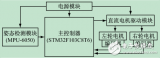
本文主要对基于STM32和MPU-6050的两轮自平衡小车系统设计与实现进行了分析,采用高性能STM32F103C8T6作为主控制器,采用卡尔曼滤波算法和双闭环PID控制算法对小车进行自平衡控制。提高了数据采集和控制
2017-12-23 16:36
mpu6050常用作提供飞控运行时的姿态测量和计算。本文首先介绍了MPU6050姿态解算的原理,其次详细的介绍了mpu6050姿态解算程序。
2018-03-09 09:15
本文开始介绍了mpu6050的定义和mpu6050的感测范围,其次阐述了mpu6050特征,最后介绍了mpu6050与单片机的连接方法。
2018-03-09 08:42
使用Platformio平台的libopencm3开发框架来开发STM32G0,下面为GPIO接按键的使用方式。
2023-01-17 10:48

本文为大家分享了mpu6050六轴传感器模块驱动程序源代码,STM32F1读取MPU6050的加速度和角度传感器数据的初始化步骤,以及MPU6050DMP初始化函数、D
2017-12-11 14:26

本文主要介绍了mpu6050对应i2c地址是什么,并通过stm32的硬件读取mpu6050的数据。MPU6050 的 I2C 地址是 0xD0H(11010000B)。
2017-12-11 16:04

本文主要介绍了基于MPU6050的老年人跌倒监测系统设计,利用传感器MPU6050内部集成的三轴加速度、陀螺仪组件和STM32处理器结合来实现数据采集,再运用跌倒检测算法识别跌倒事件。与此同时,采用
2017-12-28 15:32
本文开始对mpu9150进行了介绍,其次介绍了mpu6050的定义、mpu6050感测范围以及mpu6050的特征,最后阐述了mpu9150和mpu6050区别。
2018-03-08 10:07

本文开始阐述了卡尔曼滤波的概念,其次阐述了卡尔曼滤波的性质与卡尔曼滤波的应用,最后介绍了mpu6050卡尔曼滤波分析及mpu6050卡尔曼滤波输出姿态角程序。
2018-03-09 08:57
本文开始介绍了mpu6500的定义与MPU6500驱动总结,其次阐述了mpu6050的定义与mpu6050感测范围,最后介绍了mpu6500和mpu6050的区别。
2018-03-08 09:54