
可以看一下单目深度估计效果,这个深度图的分辨率是真的高,物体边界分割的非常干净!这里也推荐工坊推出的新课程《单目深度估计方法:算法梳理与代码实现》。
2023-12-17 10:01

我的论文方向目前是使用单目摄像头实现机器人对人的跟随,首先单目摄像头与kinect等深度摄像头最大的区别是无法有效获取深度信息,那就首先从这方面入手,尝试通过图像获取摄像头与人的距离。
2023-07-03 10:01

双目匹配需要把左图像素和右图中其对应像素进行匹配,再由匹配的像素差算出左图像素对应的深度,而之前的单目深度估计方法均不能显式引入类似的几何约束。由于深度学习模型的引入,双目匹配算法的性能近年来得到了极大的提升。
2018-06-04 15:46

QFP100 PQFP100 TQFP100 引脚间距0.5mm 测试座 用于QFP100的IC芯片进行烧写、测试,IC体宽14×14mm 型号 OTQ-
2019-12-02 14:49

QFP100 PQFP100 TQFP100 IC引脚间距0.4mm 测试座 用于QFP100的IC芯片进行烧写、测试,IC体宽12×12mm 型号 IC51-10
2019-12-04 10:40

QFP100 PQFP100 TQFP100 IC引脚间距0.5mm 测试座 用于QFP100的IC芯片进行烧写、测试,IC体宽14×14mm 型号 IC51-10
2019-12-02 14:43

QFP100 PQFP100 TQFP100 IC引脚间距0.5mm 测试座 用于QFP100的IC芯片进行烧写、测试,IC体宽14×14mm 型号 IC51-10
2019-12-04 10:50
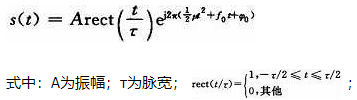
雷达系统在研制过程中,各部分往往是并行的,在调试信号处理分系统时,如果天线没做好,就得不到阵面送下来的回波数据,这时调试就无法正常进行。为了解决这一问题,往往先设计一个模目信号,把信号处理分系统调试好,待其他分系统也调试好后,再切换为正常接收模式,进行系统联试。
2021-06-26 14:40

-20~+100度测温电路
2009-04-27 22:00
