爬壁机器人常用的吸附方式有以下几种:真空吸附、磁性吸附、静电
2023-08-09 15:24
爬壁机器人的零件组成可以根据不同的设计和应用而有所差异。以下是一般常见的爬壁机器
2023-08-01 16:15
爬壁机器人是一种可以在垂直或近垂直表面上移动和操作的机器人。它们被设计用于执行特定任务,例如在建筑物外墙进行清洁、在工厂内部的管道进行检测和维护,或在危险的环境中进行探
2023-07-27 14:56
爬壁机器人: - 爬壁机器人是专门设计用于在垂直
2023-08-22 15:05
爬壁机器人可以根据其工作原理、设计和应用领域进行分类。以下是一些常见的爬壁机器
2023-08-21 14:53
呢?它利用了什么原理呢?李博士介绍说,爬壁机器人利用负压发生器和负压枪来实现这一过程。负压发生器设有多个单吸盘,通过排气来实现吸盘的吸附,在排出的气量大于进气量时,就会
2010-12-14 21:27
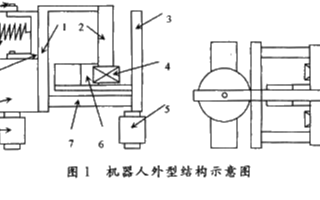
本文介绍的磁驱动微小爬壁机器人,采用电磁吸附技术,尺蠖运动原理,具有结构简单、重量轻、加工制作容易、控制灵活、控制电路简
2020-04-25 17:44
静强度分析考察塔筒承受极限载荷的能力,是对结构强度最基础的检验,在工程设计中往往以静强度分析结果为参考对
2020-06-09 11:26
选择和使用磁吸附爬壁机器人时,需要根据具体应用的需求和安全性要求来评估和确定其适用的载重能力。最好参考机器人制造商提供的
2023-08-04 15:37
