
本本文介绍了一种基于激光雷达数据的激光网络自动驾驶三维目标检测方法——LaserNet。高效的处理结果来自于在传感器的自然距离视图中处理激光雷达数据。在激光
2019-06-02 10:00
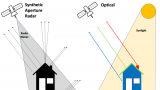
自动驾驶难度很大,标记数据不应该那么难。利用Ouster激光雷达数据自身的2D-3D特性,将数据标记成本降低了50%。
2019-01-28 13:41

变量h r e s h_{res}和v r e s v_{res}非常依赖于所使用的LIDAR传感器。在KTTI数据集中,使用的传感器是Velodyne HDL 64E。根据Velodyne HDL 64E的规格表,它具有以下重要特征:
2023-11-30 16:53
轮速计就是安装在电机上的编码器,通过电机旋转的圈数来计算机器人所走过的距离与角度,在ROS中称为Odometry,译为里程计.
2022-10-09 15:34
对海上船只来说,精确测量海浪、水流和对水航速非常利于执行各种任务,包括优化燃油以及在受限海域内航行。例如,即使对水航速测量失之毫厘,船舶性能计算结果也可能谬以千里,并且日耗油量可能增加数十吨。
2022-11-10 10:42
雷达数据采集及图像显示是雷达的一个基本应用,普遍应用于军事、气象预测、环境监测、船舶导航等领域。雷达数据具有实时性、高速
2018-02-21 07:45

移动底座和激光雷达与Cortex-A53平台都是通过串口来通信的。在基于Cortex-A53处理器的平台上处理激光雷达的扫描数据以及底座中采集的里程计数据,结合激光
2018-03-13 09:15
首先,Ollie Ballinger使用的是公开可获得的数据,这些数据是通过卫星捕获的,他使用这些数据来检测和追踪军事雷达。这意味着,任何人只要有足够的专业知识,都可以
2023-12-05 14:49
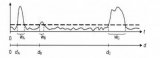
通过理论分析和实验验证可知一二两层返回的信息主要包括路面、车道线、少量障碍物和边界数据;三四两层主要返回道路边界、障碍物和少量路表信息,所以在特征种子点提取阶段需要重点分析一二两层的雷达数据,这部分
2018-05-25 01:57

·由于PC机运行的windows98系统是非任务抢断型的操作系统,在如此高的通讯速率要求下(两路雷达数据同时到来时对PC机来说瞬时通讯速率为1Mbps,有时会导致系统丢失一帧数据中的某几个字节,从而使整帧
2020-06-26 11:46