机器人技术中的操作臂的雅克比
2017-05-18 09:14
估计值附近进行泰勒级数展开,求导获得相应雅克比矩阵,在获得观测及系统误差的基础上,得到针对此问题的扩展卡尔曼滤波方程。仿真结果表明该方法的有效性。
2023-02-15 17:25
分离散,然后对离散后的非线性方程组采用牛顿法进行整体求解。利用雅克比矩阵所具有的带状结构特征,采用矩阵方程分裂一组合技巧,避免了对整体雅可比矩阵或多个分块子矩阵进行三角分解,从而提高了暂态稳定性数值计算的
2018-03-01 15:05
使用常规方法可能会不收敛,成为病态潮流。病态潮流的出现主要有以下两方面的原因: 1)潮流计算的解远离平启动点,使得在平启动下使用常规潮流计算方法无法求出。 2)在系统重负荷、接近功率极限点时,系统的雅克比矩阵,出现奇
2018-02-08 16:00

闭环,且由三组对称的支链构成这种折页式三自由度并联机构。为了获得该并联机构的运动学参数变化和奇异性,运用支链坐标系的方法,对该机构的每一个构件都做了详细的运动学分析,并且获得了该系统的雅克比矩阵和各构件的
2018-03-27 10:11
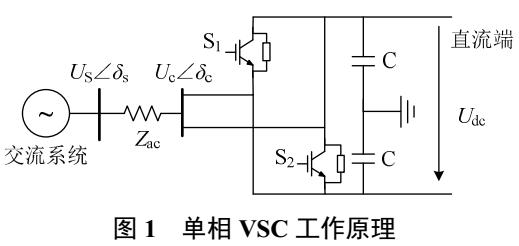
,结合潮流计算的基本要求,提出了不同控制方式下VSC型换流器并网节点等效处理方法,并对雅克比矩阵相应元素的计算表达式进行推导,构建了计及VSC型换流器控制方式的统一迭代潮流计算的牛顿拉弗逊算法。含多端柔性直流输电(VSC-HVDC)输电系统及多类型风电的IEEE-30节点系统
2018-01-31 14:59
函数非常多,主要涉及到机器人建模、正运动学、逆运动学、动力学、逆动力学、雅克比、轨迹规划等。对于机器人建模,用到最重要的两个函数就是Link和Seriallink函数(1)Link 类Link包含了与机器人连杆相关的所有信息,例如运动学参数、刚体惯性参数、电机和传送参数等。使用方法:A :关
2021-09-15 09:04
导数和微分13.3 偏导和高阶混合导数13.4 雅克比矩阵13.5 计算导数的值13.6 不定积分13.7 定积分13.8 带参数的定积分13.9 积分属性的应用13.10 数值积分13.11 级数
2018-10-30 16:06
电常数。所以,一般人都认为压电效应是皮埃尔·居里(Pierre Curie)和他的哥哥雅克斯·居里(Jacques Curie)发现的,其实这里面离不开他的老师李普曼教授的指导。皮埃尔·居里长期从事晶体
2021-05-31 07:52
孔度是法国巴黎的雅克·阿马勃勒·勒格朗博士在1866年发明的。这是测量在2厘米长的线段内齿孔数的简单方法,一直沿用到至今,并且能使集邮家精确地表述齿孔的各种变异。一枚标有“齿孔14度”的邮票,就意味着
2021-05-31 06:10