
基于点云的3D障碍物检测 主要有以下步骤: 点云数据的处理 基于点云的障碍物分割 障碍物边框构建 点云到图像平面的投影 点云数据的处理 KITTI数据集 KITTI数据集有四个相机,主要使用第三个
2023-06-26 10:22
基于fpga的3D打印清洁机器人。该机器人具有多个用于检测障碍物的传感器和一个用于清洁地板的吸尘器。此外,该机器人还包含一种导航算法,使其能够尽可能高效地驶离房间并相应地对障碍物做出反应。
2021-04-28 15:09
这个阶段主要作用是障碍物集群做XY平面下的凸包多边形计算,最终得到这个多边形的一些角点。第一部分相对比较简单,没什么难点,计算凸包是调用plc库的ConvexHull组件(具体请参考pcl::ConvexHull)。
2018-12-06 16:23
的特点,这使得它非常适合用于探测和测距。 雷达探测障碍物的工作原理 雷达(包括超声波雷达)通过发射装置向外发射超声波。 这些超声波遇到障碍物后会被反射回来。 雷达的接收器接收到反射回来的超声波后,根据超声波往返的时间和速度(声速),
2024-08-16 10:26
针对激光传感器在室外环境中检测动态障碍物所遇到的数据处理存在延时、检测结果准确率不高等问题,提出了一种基于3维激光传感器Velodyne和四线激光传感器Ibeo信息融合的动态障碍物检测及表示方法
2016-11-20 11:26
听过微软的Kinect或iPhone X的Face ID传感器中包含RGB-D相机,它们很强大,因为这些传感器体积小、成本低、速度快。但是,RGB-D相机经常会在深度输出上出现很多洞,因为前方背景的障碍物遮挡或者模式识别的故障等问题。
2018-08-31 09:59

在得到初始视差图后,需要进一步判别障碍物的远近及大小,所以这里引入 V-视差和 U-视差理论 [7] 。 V-视差图是在初始视差图的基础上,累加视差图像每一行上具有相同视差值 dv 的像素个数,以
2018-11-29 16:27
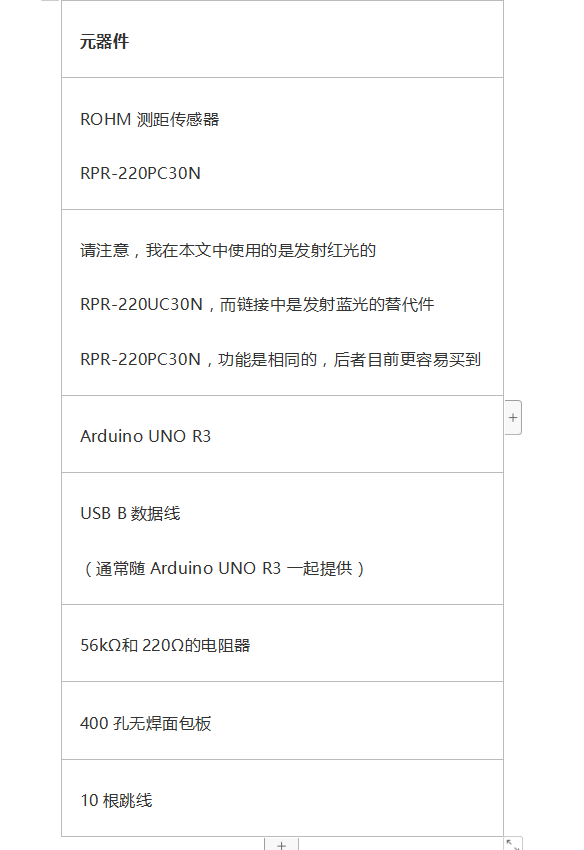
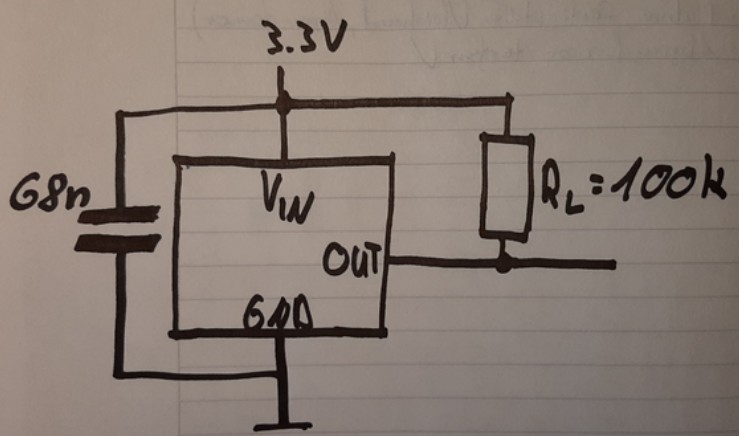
在这个DIY项目中,我们将开发一个电路,使用Arduino的数字引脚为测距传感器的LED供电。LED发出的光将从木制目标反射,并被光电晶体管接收,光电晶体管将产生电压信号,由Arduino中的模拟引脚读取。由于电压变化相对于距离变化不呈线性关系,在与目标不同距离处收集的数据将用于使用MATLAB生成控制方程。然后,将通过Arduino在代码中使用该方程来测量距离。
2022-04-03 10:22
该基于微控制器技术倒车障碍物捡测系统比单纯用硬件电路系统要方便灵活得多,因为可用充分发挥软件技术的优势,既可根据运行与泊车环境需要增加功能又替代很多硬件电路,使倒车障碍物捡测系统更可靠准确。##发送器部分的控制。
2014-02-25 10:35
动态遮挡规避是指运动视觉目标在某一时刻发生遮挡时,以该时刻视觉目标遮挡区域为研究对象,通过对视觉目标进行运动估计、合理规划摄像机的运动方式并多次移动摄像机以便观测到更多的遮挡
2020-01-16 17:37