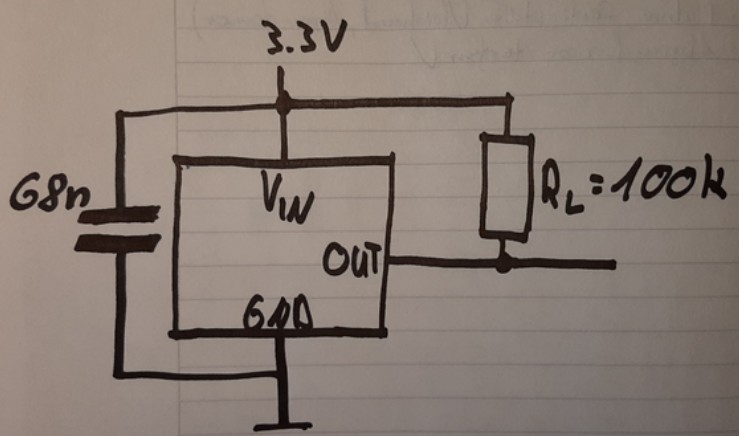
基于fpga的3D打印清洁机器人。该机器人具有多个用于检测障碍物的传感器和一个用于清洁地板的吸尘器。此外,该机器人还包含
2021-04-28 15:09
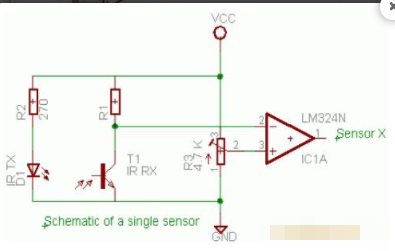
这是基于ATmega16构建的线跟随机器人的完整电路图。线跟随机器人电路有传感器模块、微控制器模块和直流电机模块三个模块。
2022-06-08 16:32

基于点云的3D障碍物检测 主要有以下步骤: 点云数据的处理 基于点云的障碍物分割 障碍物边框构建 点云到图像平面的投影 点云数据的处理 KITTI数据集 KITTI数据
2023-06-26 10:22
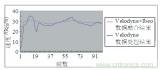
针对激光传感器在室外环境中检测动态障碍物所遇到的数据处理存在延时、检测结果准确率不高等问题,提出了一种基于3维激光传感器Velodyne和四线激光传感器Ibeo信息融合的动态
2016-11-20 11:26
Gita是一款私人货物运输机器人,它不仅可以跟随用户进行购物,并且还可以帮助用户将所购商品搬运回家。Gita采用双轮设计,移动时会自动保持平衡,且因为内置镜头,支持即时定位与3D地图构建技术,移动
2017-12-28 18:02
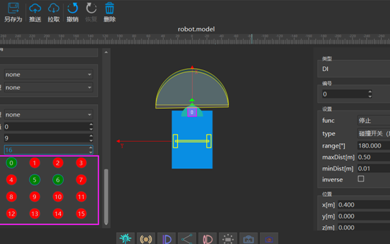
机器人模型是如何创建的?需要工程师一行一行敲写代码吗?每一次模型创建都需要重新开始吗?创建过程总是艰难而又复杂的吗?
2019-06-25 15:34
感谢关注机器人博览国内最具影响力的集机器人/VR/AI产业研究、行业资讯、前言技术为一体的垂直领域服务平台。
2018-03-28 16:04
本文通过对移动机器人的研究,实现了基于渡越时间法的超声波测距模块设计,为机器人提供简单方便的障碍物距离检测。本文主要完成对主控板控制器软件设计、电机驱动控制器软件设计和
2016-09-18 14:11
这个阶段主要作用是障碍物集群做XY平面下的凸包多边形计算,最终得到这个多边形的一些角点。第一部分相对比较简单,没什么难点,计算凸包是调用plc库的ConvexHull组件(具体请参考pcl::ConvexHull)。
2018-12-06 16:23
移动机器人的定位和地图创建是自主移动机器人领域的热点研究问题。对于已知环境中的机器人自主定位和已知机器人位置的地图
2017-11-10 14:49