
三维场景理解与重建技术主要包含场景点云特征提取、扫描点云配准与融合、场景理解与语义分割、扫描物体点云补全与细粒度重建等,在处理真实扫描场景时,受到扫描设备、角度、距离以及场景复杂程度的影响,对技术的精准度和稳定性提出了更高的要求,相关的技术也十分具有挑战性。
2023-08-08 16:58

景点语音导览主要有以下几种方式:一种是通过全球定位系统(GPS)的用户终端接收工作卫星的导航信息,从而解算出车辆的经纬度信息,进而计算出实时坐标,将其与景点坐标相比较,当车辆驶入景点一定距离范围内时,不用人工干预,系
2015-07-30 16:33

杭州亚运会虽然落下帷幕,但“西湖亚运观光车”的话题却是热度不减。观光车作为旅游城市、旅游景点的必备。对于知名城市跟景点肯定都会选用优质的四轮观光车,而电机作为观光车的核心部件,电机厂家必然会投入好的研发。
2023-10-21 16:27
在局部匹配中,我们引入了一个新的空间,现在需要想方法,每个变换中找到一个最优的变换矩阵,使得场景点云中落在模型点云表面的特征点最多,就能求得目标的位姿。
2022-10-28 14:16
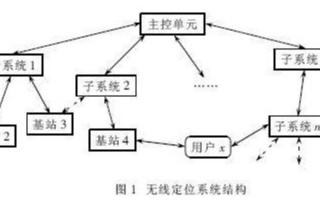
本文通过分析旅游景点的人员情况,利用ZigBee技术设计了一种无线管理系统,实现对区域内人员的监控和管理。系统支持无线定位服务,在紧急情况下可进行搜救工作,弥补了现有无线导游系统的不足。
2020-01-21 10:19

的90%以上,主要覆盖拉萨市区、郊区、火车站周边、机场周边,主要为交通干线、重要旅游景点、郊区人口集中地、工业和经济开发区、休闲度假区、党政军机关、3星级及以上酒店、商场、交通枢纽。
2017-12-11 14:08
想象一下,在骑着平衡车玩的时候,偶遇在某些不可骑行的地段,你就不必拎着笨重的平衡车前行,这时候,路萌机器人就会变成一个呆萌的「小跟班」,紧紧跟随着你。智能跟拍周末在外面的景点游玩,你一定会遇到一些情况,比如说,想要自拍,或者希望记录游玩时一些美好景象,通过路萌机器人的智能跟拍功能也可以轻易实现。
2018-09-28 14:41
。XPMTM,即Super Permanent Memory(超级永久性存储器)。我们起名为X- RFID,X-RFID 具有高安全、低价、可靠性高和容量大等特点,可广泛应用于图书管理、证件防伪,景点会议门票,产品防伪,电子钱包,资产管理,单品管理,物流和供应链管理等众多领域。
2010-12-11 10:08

作者引入了一种方法,可以仅使用单个宽基线立体图像对生成新视角。在这种具有挑战性的情况下,3D场景点只被正常观察一次,需要基于先验进行场景几何和外观的重建。作者发现从稀疏观测中生成新视角的现有方法因
2023-06-13 09:29

随着科技发展的日新月异,生活垃圾已经成为影响环境,影响人类生活,甚至影响人类生存环境的重要因素。大街小巷,旅游景点,校园内部到处充斥着人类的生活垃圾,垃圾桶已经成为人们日常生活中常见的必备用品,每天
2015-07-07 16:20