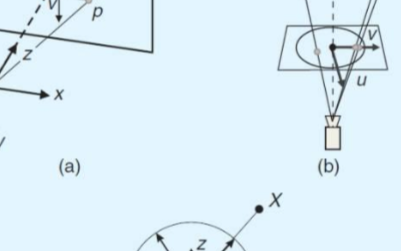
本文提出了一种新的直接视觉里程计算法,利用360度相机实现鲁棒的定位和建图。本系统使用球面相机模型来处理无需校正的等距柱状图像,扩展稀疏直接法视觉里程计(DSO,direct sparse odometry),从而实现全方位感知。
2022-12-14 14:53
在导航系统中,里程计(odometry)是一种利用致动器的移动数据来估算机器人位置随时间改变量的方法。例如,测量轮子转动的旋转编码器设备。里程计总是会遇到精度问题,例如轮子的打滑就会导致产生机器人移动的距离与轮子的旋转圈数不一致的问题。
2019-08-08 14:21
摘要:本文主要分析轮式移动机器人的通用里程计模型,并以两轮差速驱动机器人的里程计计算为案例,给出简化后的两轮差速驱动机器人里程计模型。
2023-04-19 10:16

论文提出了PVO,这是一种新的全景视觉里程计框架,用于实现场景运动、几何和全景分割信息的更全面建模。
2023-05-09 16:51

VIO-SLAM Visual-Inertial Odometry(VIO)即视觉惯性里程计,有时也叫视觉惯性系统(VINS,visual-inertial system),是融合相机和IMU数据
2021-04-07 16:57

受简化惯性传感器系统(RISS)[23]的启发,我们开发了视觉惯性车轮里程计(VIWO)。具体而言,我们将MSCKF中的系统模型重新设计为3DRISS,而不是INS,使用里程表、3轴陀螺仪和2轴(向前和横向)加速计的
2023-06-06 14:30

提出一种新型的视觉-LiDAR里程计和建图系统SDV-LOAM,能够综合利用相机和激光雷达的信息,实现高效、高精度的姿态估计和实时建图,且性能优于现有的相机和激光雷达系统。
2023-05-15 16:17
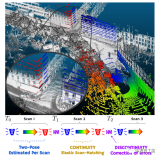
通过在每一帧扫描的开始和结束时刻联合优化两个姿势,并根据时间戳进行插值,使扫描进行弹性变形以与地图(白点)对齐,从而创建连续时间扫描到地图的里程计。图片最下面下面说明轨迹具有扫描内姿势的连续性和扫描之间的不连续性。
2023-08-02 15:29

如何让多相机视觉SLAM系统更易于部署且对环境更具鲁棒性?本文提出了一种适用于任意排列多相机的通用视觉里程计系统。在KITTI-360和MultiCamData数据集上验证了该方法对于任意放置相机的鲁棒性。与其他立体和多相机视觉SLAM系统相比,该方法获得了更高的位姿估计精度,具有更好的泛化能力。
2024-12-13 11:22

针对具有挑战性的光照条件和恶劣环境,本文提出了LIR-LIVO,这是一种轻量级且稳健的激光雷达-惯性-视觉里程计系统。通过采用诸如利用深度与激光雷达点云关联实现特征的均匀深度分布等先进技术,以及利用
2025-04-28 11:18