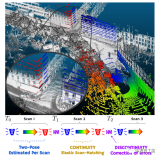
通过在每一帧扫描的开始和结束时刻联合优化两个姿势,并根据时间戳进行插值,使扫描进行弹性变形以与地图(白点)对齐,从而创建连续时间扫描到地图的里程计。图片最下面下面说明轨迹具有扫描内姿势的连续性和扫描之间的不连续性。
2023-08-02 15:29

如何让多相机视觉SLAM系统更易于部署且对环境更具鲁棒性?本文提出了一种适用于任意排列多相机的通用视觉里程计系统。在KITTI-360和MultiCamData数据集上验证了该方法对于任意放置相机的鲁棒性。与其他立体和多相机视觉SLAM系统相比,该方法获得了更高的位姿估计精度,具有更好的泛化能力。
2024-12-13 11:22

针对具有挑战性的光照条件和恶劣环境,本文提出了LIR-LIVO,这是一种轻量级且稳健的激光雷达-惯性-视觉里程计系统。通过采用诸如利用深度与激光雷达点云关联实现特征的均匀深度分布等先进技术,以及利用
2025-04-28 11:18
IMU测量可以提高视觉SLAM在某些复杂场景的鲁棒性,在于相机快速运动、动态障碍物、光线明暗变化明显、环境中纹理缺失等导致图像信息质量较差的情况下,利用IMU信息仍能得到有效的定位结果。
2023-09-07 16:57
LIO-SAM 提出了一个利用GT-SAM的紧耦合激光雷达惯导里程计的框架。实现了高精度、实时的移动机器人的轨迹估计和建图。
2022-10-31 09:25

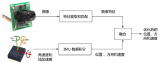
随着汽车微电子装备的大量增加,半导体逻辑器件对电磁干扰敏感度相当高,加之汽车线速与有关高场强频段的波长可以比拟,这些频段存在对车载电子系统造成强烈电磁干扰的隐患;车载电磁低电压、大电流负载特性使其开关过程在供电线路上产生很多脉冲干扰,进一步恶化了电磁环境。因而,在实际的汽车电器设计中,电磁兼容设计通常成为设计成败的关键。
2021-04-06 14:05
其一是实际环境中的动态物体不一定被预训练,另一是算法无法区分"动态物体"和"静止但可能移动的物体"。
2022-10-12 09:22
VoxelMap++的流程如图1所示,LiDAR原始点预处理方法和基于迭代误差状态卡尔曼滤波器的状态估计方法与FASTLIO 类似。值得注意的是,本文的建图方法可以适用于其他最先进的LiDAR惯性算法,无论其基于卡尔曼滤波器还是优化。
2023-09-11 17:02

LOG-LIO的流程接收来自3D激光雷达和惯性测量单元(IMU)的输入,如图2所示。对于新的输入扫描,我们首先使用Ring FALS来估计原始点的法线,在使用IMU测量校正畸变后,根据它们的局部几何信息,在未畸变的点云和地图之间执行关联。
2023-08-18 15:45
轮速计就是安装在电机上的编码器,通过电机旋转的圈数来计算机器人所走过的距离与角度,在ROS中称为Odometry,译为里程计.
2022-10-09 15:34