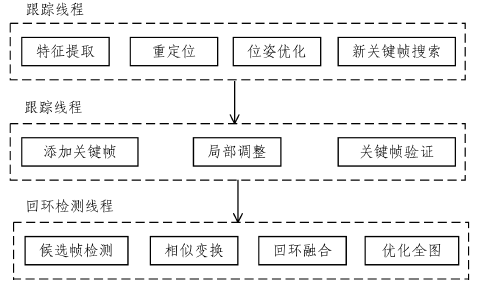
鲁棒数据关联是视觉里程计的核心问题,图像间的对应关系为摄像机姿态和地图估计提供了约束条件。目前最先进的直接和间接方法使用短期跟踪来获得连续的帧到帧约束,而长期约束则使用循环闭包来建立。在这篇论文
2020-10-28 08:00
使用几何假设和测试架构从特征轨迹产生相机运动的鲁棒估计。这就产生了我们称之为视觉测径法,即仅从视觉输入的运动估计。没有事先知道的场景或运动是必要的。视觉里程计还可以结合来自其他来源的信息,如GPS、惯性传感器
2018-12-03 08:00
针对单一RGBD摄像头SLAM时,快速移动导致跟踪失败的问题,提出了一种基于UWB、里程计和RGBD融合的室内定位方法。该方法在UWB定位的基础上,利用里程计降低UWB固有的漂移误差。使用了加权平均
2021-04-25 14:47

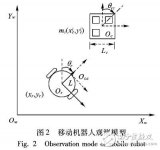
通过分析全景视觉与里程计传感器的感知模型的不确定性,提出了一种基于路标观测的 移动机器人 自定位算法. 该算法利用卡尔曼滤波器,融合多种传感器在不同观测点获取的观测数据完
2011-06-28 10:58
视觉惯性里程计 综述 VIO Visual Inertial Odometry msckf ROVIO ssf msf okvis ORB-VINS VINS-Mono gtsam目录里程计
2021-07-27 07:21
频率低、定位信息不连续等问题,在分析陀螺仪和里程计角度误差特点的基础上,提出一种基于方差加权角度融合的方法实现角度融合;最后,设计里程计误差模型,使用Kalman滤波器融合里程计和视觉定位信息弥补单个传感器定位缺陷
2017-11-28 10:16
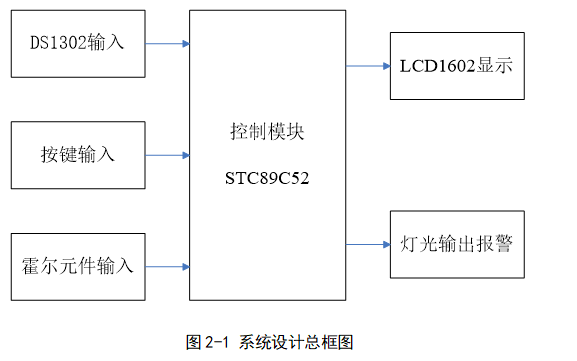
随着自行车行业和电子技术的发展,自行车速度里程计技术也在不断进步和提高,不仅可以显示速度里程,还可以显示热量消耗、心跳等参数,在大家注重环境保护和运动健康的今天,速度里程计不仅可以使运动者运动适量
2020-05-15 08:00

一、 系统设计关键部件:器件选型2 关键技术选型2.1 基于二维码+轮子里程计的机器人定位方案主流方案效果循线根据电磁线行走存在路线固定的问题纯视觉室内相似场景较多,存在重定位问题纯激光成本高,存在
2021-11-06 19:36
应用跳出屏幕的限制,让它们能够以全新的方式与现实世界进行交互。 基础技术视觉惯性里程计 ARKit 使用视觉惯性里程计 (Visual Inertial Odometry, VIO) 来精准追踪周围
2017-09-25 16:08
本文介绍了工作在特殊环境下的机器人导航系统,实现了利用罗盘和里程计等内部传感器对GPS 定位误差的修正。文章给出了消防机器人导航的主要算法流程,以及利用改进自适应卡
2009-09-25 15:41