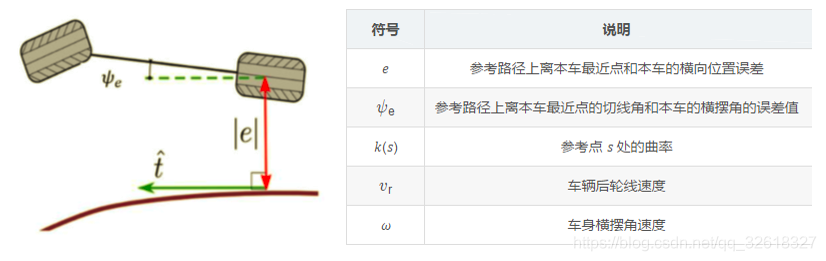
后轮反馈控制算法 后轮反馈式(Rear wheel feedback)是利用 后轮中心 的 路径跟踪偏差量 来进行转向控制量计算的方法 根据运动学方程(2-1)及车辆后轮与参考路径的几何关系,可推导出参考路径坐标系 (
2023-11-15 16:26

,通过三个全向轮驱动底部球体调整自己在球上的位置,保持动态平衡的同时实现全向移动。 保持动态平衡过程需要对机器人进行运动学分析,这里参考了平衡小车之家的运动学方程: 自平衡控制问题转化为三步:输入X、Y角度—控制
2021-09-26 10:59
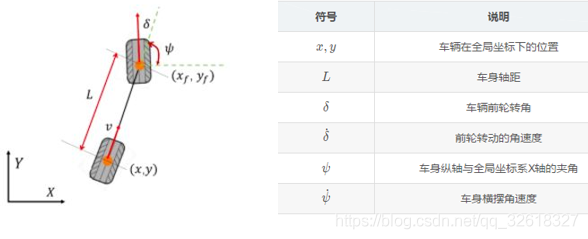
车辆运动学模型 基于车辆运动学模型的控制方法主要考虑了车辆的运动学约束对车辆控制的影响。 平时见到的汽车属于 阿克曼转向,通常可以简化为两轮的自行车模型 其假设车辆的前后轮均为刚体,只能沿着车轮滚动
2023-11-15 16:16

机器人运动学中的运动学约束是指机器人在运动过程中受到的限制,包括位置、姿态、速度和加速度等因素。这些约束会对机器人的自由度产生影响,从而影响机器人的运动和控制。
2024-01-18 16:45

引言: 在本文中,我们将深入探讨机器人学的两个核心概念:正运动学和逆运动学。这两个概念是理解和控制机械臂运动的基础。通过一个具体的7轴机械臂实例,我们将详细介绍如何计算机械臂的正
2023-11-06 14:58

状态机下面的是运动控制部分和环境和物理模型。运动控制很简单 – 直接计算反向运动学,将算好的关节角度交给物理模型去展现。物理模型构建也很简单—— 用 SimScape 中的 SimMultibody 直接导入机械臂的
2019-09-11 15:08
据推测,未来鼠标将很可能加入现在智能手机上很普遍的陀螺仪、加速度计等高级运动学传感器。加入这些传感器之后,鼠标则具备一些新的手势操作功能。
2013-01-04 09:51
据调查,目前将DSP应用于机器人控制系统的方案,通常是将机器人位置控制中运动学计算任务交给PC机完成,PC机将计算结果(机器人各关节的转角)下载到以DSP芯片为核心的电机控制器,实现机器人控制眼演
2019-06-20 08:02
,因此,该方法比较适合应用于低速曲率较小的路径跟踪控制场景中。 基于运动学模型的横向控制算法中,Pure Pursuit 和 Stanley 前轮反馈算法在中低速场景下,他们的路径跟踪的性能较好。 Pure Pursuit 在大的跟踪误差和非连续的路径场景下鲁棒
2023-11-15 17:02
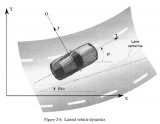
基于简单的自行车模型,可以将运动学和动力学控制方程输入模型预测控制(MPC)算法。
2019-06-03 15:48